
Khludenkov
-
Количество публикаций
79 -
Зарегистрирован
-
Посещение
-
Days Won
1
Сообщения, опубликованные пользователем Khludenkov
-
-
Спасибо. Нашёл
-
15 часов назад, Smorodov сказал:Поздно но наткнулся на пакет для решения подобных задач:
https://github.com/cruxopen/openISPБольшое спасибо.
Совсем даже не поздно.
У нас всё очень неспешно происходит...
15 часов назад, Smorodov сказал:Поздно но наткнулся на пакет для решения подобных задач:
https://github.com/cruxopen/openISPНо не совсем понял, по какой книге это сделано, вроде ссылка на книгу есть, но что-то не переходит...
-
2 минуты назад, Smorodov сказал:переводить в hsv и выделять цвет, можно было бы, если бы изображение листа было без цвета, но так не бывает в реальном мире лист не белый и не серый, он тоже цветной.
А как же баланс белого обычно по белому листу делают?
Или это не правильный подход?
-
Я ещё пробовал переводить в пространство HSV, там определять какой сдвиг по Н даёт объектив.
И затем для каждого кадра видео тоже переводить из rgb в hsv, там делать коррекцию, затем назад в rgb.
Честно говоря, наверное идея хорошая, но с реализацией не вышло.
Ни по точности, ни по скорости...
-
Большое спасибо.
ЦитатаСнимаете 2 кадра A и B.
Снимаем белый лист?
-
Здравствуйте. Имеется объектив, в котором присутствует цветовое виньетирование.
Т. е. у него в центре изображение более зелёное,
и соответственно, более сиреневое по краям.
Сейчас мы делаем снимок белого листа, и определяем коэффициенты неоднородности.
Затем для каждого кадра видео потока применяем эти коэффициенты.
Софт написали сами, очевидно, что не оптимально и не без ошибок.
Скажите, может быть уже имеются готовые решения?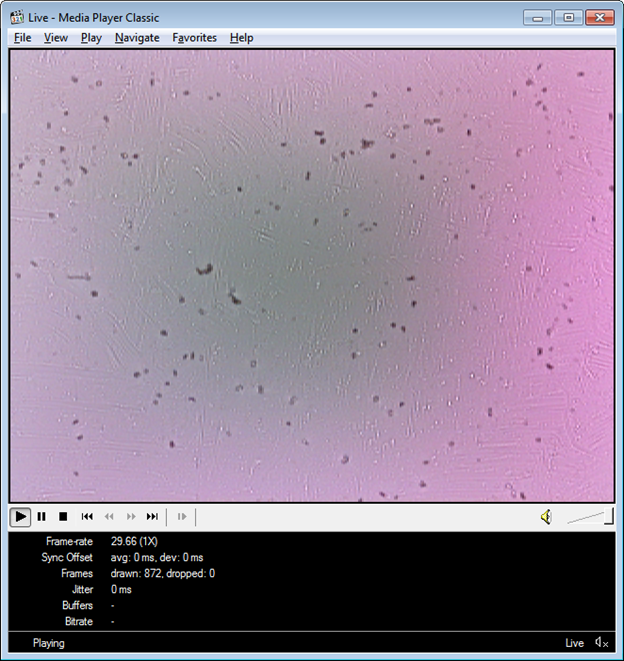
-
Спасибо. Попробую.
-
Спасибо.
11 минуту назад, idrua сказал:В OpenCV это одна строка кода.
Здесь всё хардово сделать надо...
Формат кадра - YUV422. До этого работал только с RGB.
Цветокоррекция должна быть на самом начальном этапе.
-
Здравствуйте.
Вопрос возможно не в тему. Если знаете, подскажите, где можно посмотреть.
Сейчас настраиваю оптический сенсор OV5640, в частности его цветность.
Там есть такой параметр как матрица цветокоррекции. Я и так в этих вопросах не очень силён, а здесь ещё она настраивается для цветового пространства YUV.
Подскажите, кто-нибудь решал подобные задачи?
Т.е. это придётся вначале определить матрицу цветокоррекции для RGB (3Х3), а затем как-то пересчитать её для yuv?
По формулам перевода RGB в YUV ?
-
Спасибо.
А если под размер подогнать надо?
Чем лучше? Средствами opencv resize()? Или в qt своими можно?
-
Сейчас тоже этим занимаюсь. Скорее всего разные версии qt и opencv.
32-х и 64-х битные. Проверьте.
А КакSimpleQTApp - это для вижал студии?
Скажите как на форму qt выводить окно из opencv?
То есть каким образом вывести изображение на форму?
Можно на пиксмап?
-
-
У меня vs2010. Видел плагины только для 2013-й и 2015-й.
Или не там искал?
-
-
3 часа назад, Smorodov сказал:OpenCV собран с поддержкой Qt ?
Нет.
Скачал с сайта всё как было.
Без поддержки Qt не заработает?
Написал 'd' в конце библиотек
Сделал дебажную версию. Тоже не помогает...
Наверное перейду на 3.1 версию.
Подскажите, она бывает для 32-х битных платформ?
У меня сейчас ХР 32.
-
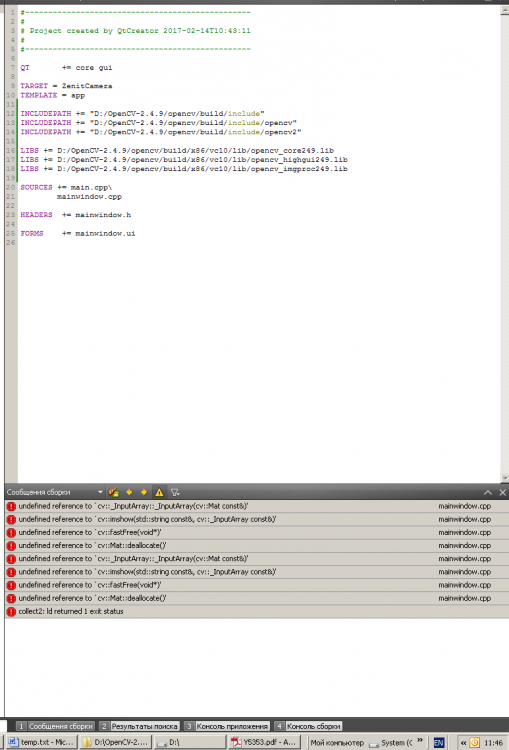
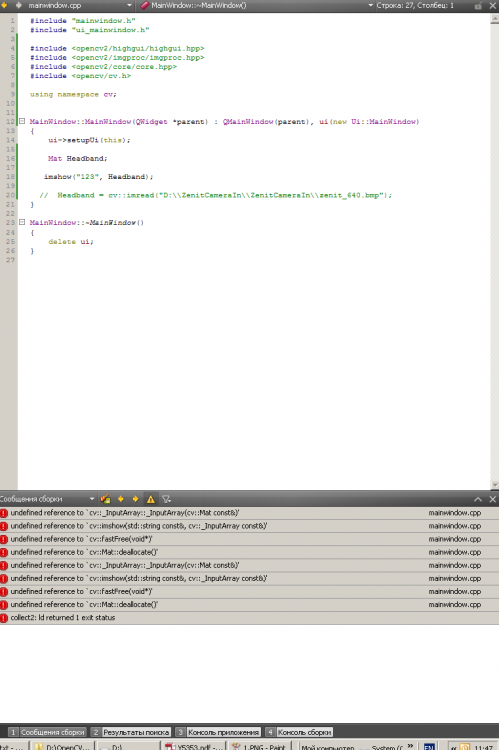
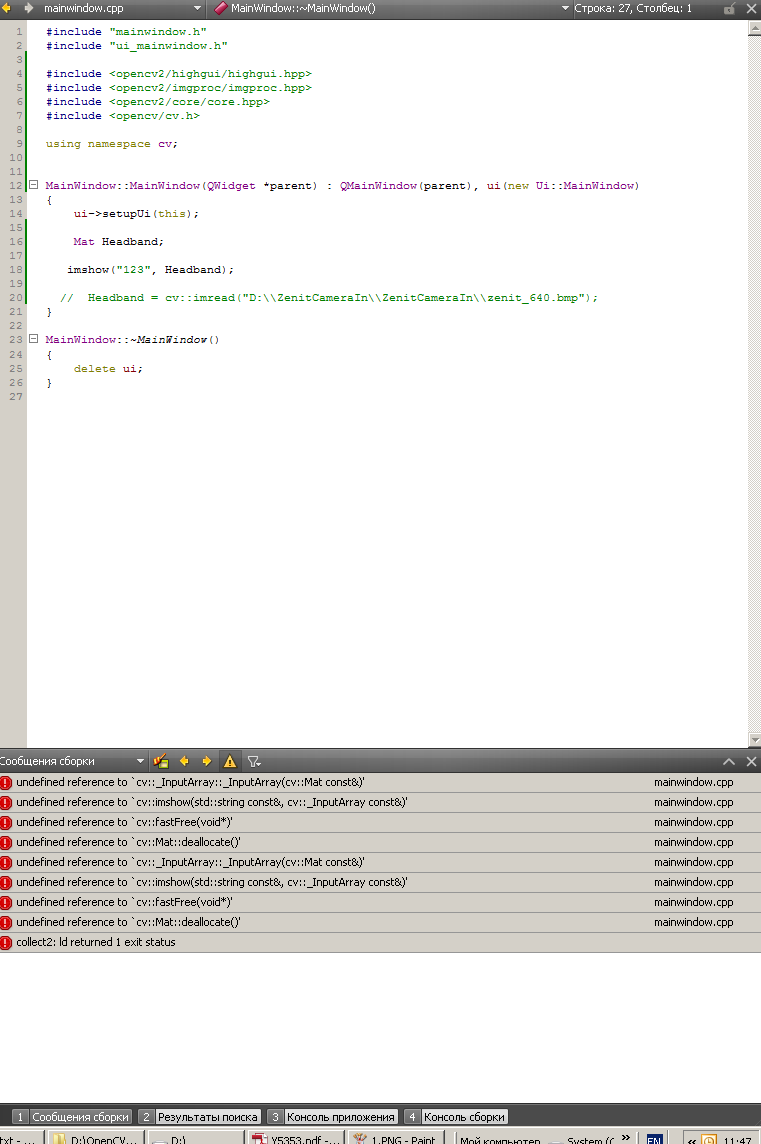
Здравствуйте. Помогите настроить OpenCV 2.4.9 в QT 4.7.4. QtCreator 2.2.1
Что-то не так делаю?
На рисунках видно что он говорит "не могу найти объявления функций"?
Или что-то другое?
-
Да. Я думаю из-за imwrite().
Это сд-карта.
А может просто сама.
Хотя вроде проверял. Сд-карта хорошая.
-
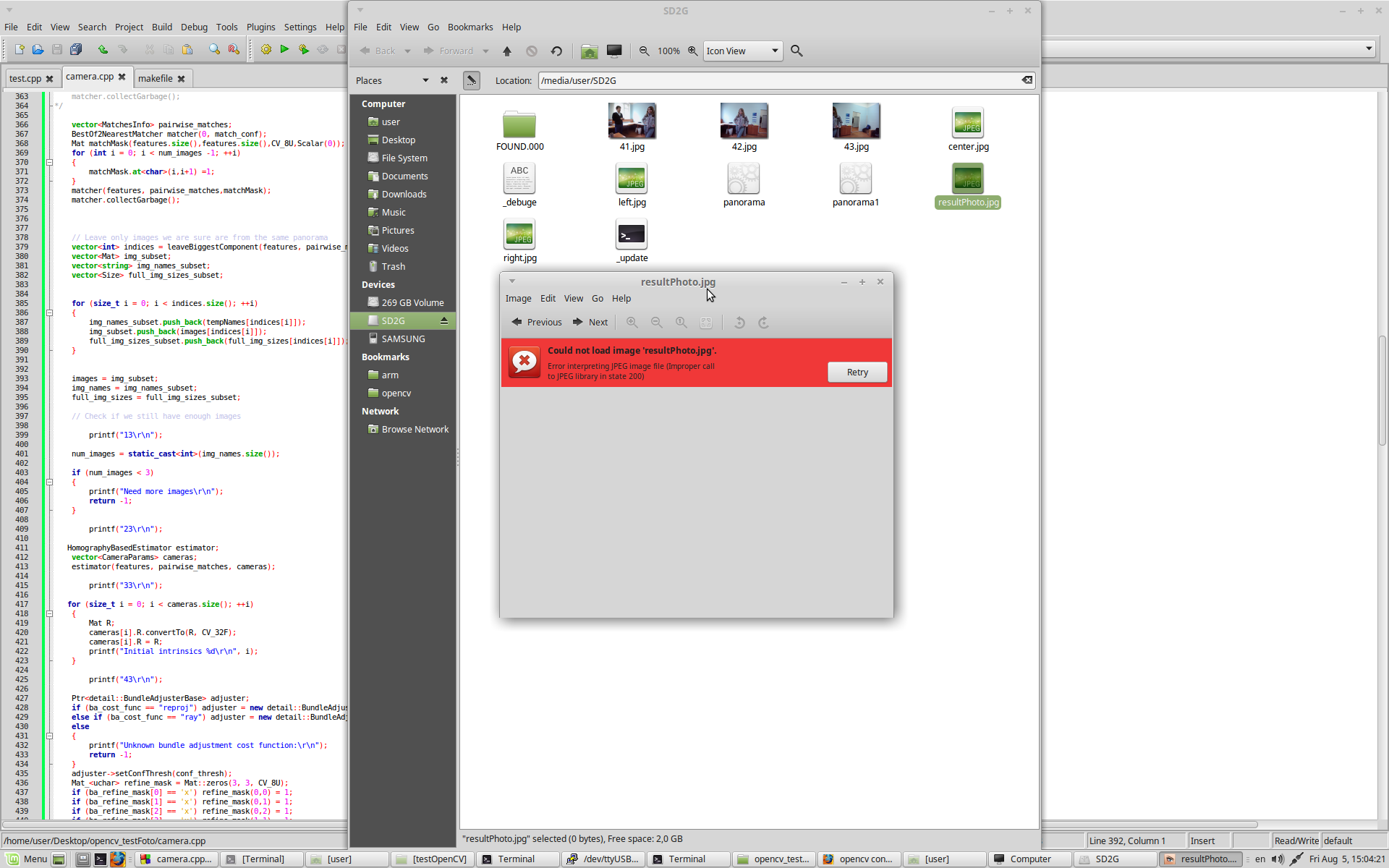
И ещё такая вещь при просмотре стала появляться:
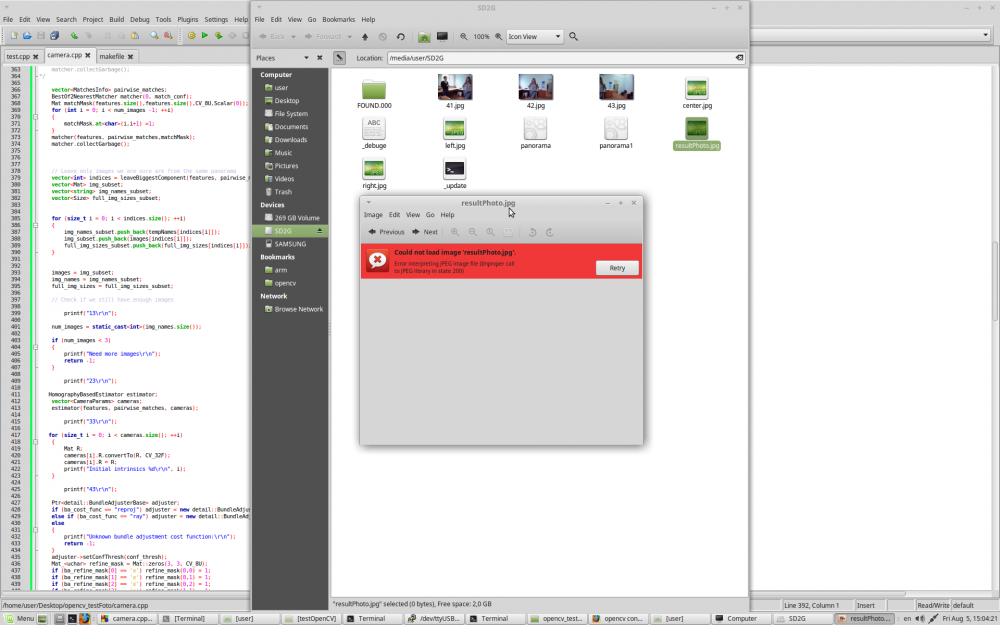
Типа не может посмотреть. Хотя до этого всё хорошо было.
-
Здравствуйте.
В процесс работы с opencv приходится много раз вызывать функции imwrite() и imread().
На настольном ПК (линукс минт 17) всё работает хорошо.
На встраиваемой системе (арм от фрискейла) иногда рушится файловая система. Проверял - именно от этого.
Есть ли в в opencv аналог си-шной функции flush?
-
Спасибо. Это тоже читал.
У меня применение написанного там в результате даже дольше работало на 5%.
Может надо ещё что настраивать в openMP.
-
Ещё заметил, в стандартном коде ститчера есть поиск соответствий между особыми точками:
vector<MatchesInfo> pairwise_matches; BestOf2NearestMatcher matcher(try_gpu, match_conf); matcher(features, pairwise_matches); matcher.collectGarbage();
То есть он просто берёт все точки со всех снимков и смотрит кучей.
Думаю тоже поделить: чтобы вначале искать соответствия между 1-м и вторым снимками, затем 2-м и 3-м и так далее.
-
Спасибо.
К слову. Заметил, что на линуксе на ПК код ститчера выполняется втрое (!) быстрее чем на том же ПК под виндой в visual studio.
-
Здравствуйте.
Продолжаю делать ститчинг на кортексе А8.
Имеется вопрос: можно ли сделать поиск особенностей не на всём снимке а на его части, допустим в правой половине снимка.
Как вариант думаю взять ROI для правой половины, искать там features обычным способом (find features) а затем как-то оттранслировать эти точки на исходный снимок.
Как вариант перебором в цикле и сложением с вектором смещения.
Или всё-таки есть опции для findfeatures, позволяющие делать поиск особенностей на части снимка?
-
Спасибо.
А либы надо будет пересобирать?
Если для с++?

UVC RGB
в Обсуждение общих вопросов
Опубликовано · Report reply
Добрый день. Имеется общий вопрос.
Где можно почитать про поддержку стандартом UVC формата RGB (RGB24).
Есть ли примеры написания дескрипторов?