
Vitalii
-
Количество публикаций
4 -
Зарегистрирован
-
Посещение
-
Days Won
1
Сообщения, опубликованные пользователем Vitalii
-
-
20 часов назад, Smorodov сказал:Посмотрите примеры здесь: https://answers.opencv.org/question/117141/triangulate-3d-points-from-a-stereo-camera-and-chessboard/ может наведет на мысли.
Благодарю!
20 часов назад, Smorodov сказал:А почему калибруете через матлаб ? OpenCv - шная тулза не подходит ? Можно попробовать откалибровать opencv-шным и сравнить коэффициенты.
Пробовал. Получаются разные результаты.
Значения матрицы M1, полученные в Matlab:
M1 = 7986.2559620260, 0.0000000000, 524.7794558939, 0.0000000000, 7603.3099586941, 765.6466654278, 0.0000000000, 0.0000000000, 1.0000000000);Значения матрицы M1, полученные в OpenCV:
M1 = 3.4296806178638740e+03, 0., 1.2727552031201496e+03, 0., 3.3866798437426000e+03, 6.9065925391676274e+02, 0., 0., 1.Фокусные расстояния, полученные в OpenCV в 2,3 раза меньше, чем в Matlab.
Результат расчёта disparity (для устранения дисторсии использовал матрицы полученные при калибровке с помощью OpenCV):
 3 часа назад, fotomer сказал:
3 часа назад, fotomer сказал:Вы хотите по 2 снимкам с такой малой базой получить премлимую 3-d карту местности? Ничего не получится, возьмите какой-нибудь софт типа Agisoft или 3DF Zephyr Free (он бесплатен) и поэксперементируте там. Кстати 3DF Zephyr Free может делать калибровку по набору произвольных фоток (штук 30) и по опыту лучше чем с шахматной доской.
Если просто нужно измерять расстояния можно использовать Aruco с 4 точками, которое выдаст координаты и направление камер. Еще Aruco нельзя в лоб снимать, точно резко падает, нужно чтоб квадрат на снимках был типа трапеции
Благодарю за рекомендации!
-
Добрый день!
Сейчас пытаюсь определить расстояние до калибровочной доски (расстояние примерно 1.6 метра, размер клетки 28 мм).
Левая камера
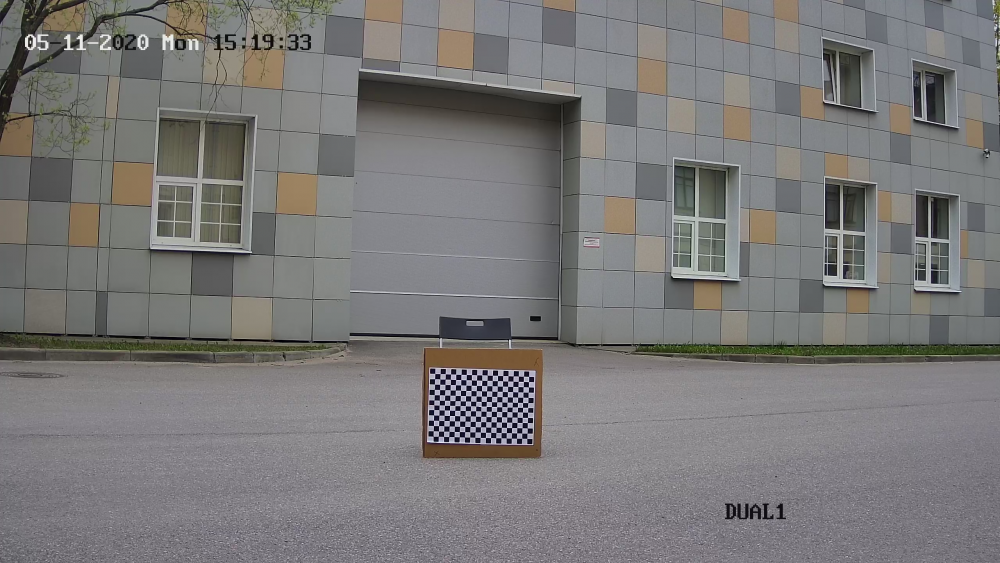
Правая камера

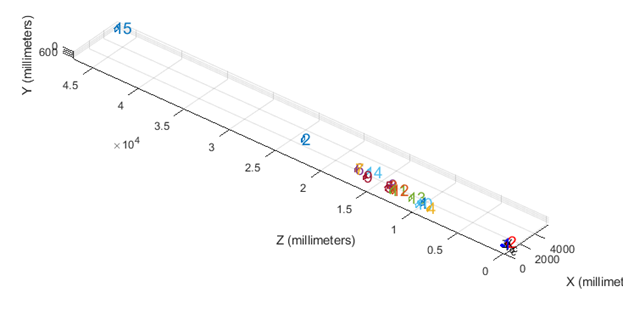
Примерное расположение доски при калибровке. Расстояние рассчитано автоматически в Matlab Stereo Camera Calibrator App.
Первый алгоритм
#include <iostream> #include <vector> #include <stdint.h> #include <string> #include <fstream> #include "opencv2/calib3d/calib3d.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" #include "opencv2/core/utility.hpp" #include <opencv2/calib3d.hpp> #include "opencv2/ximgproc.hpp" #include <stdio.h> using namespace cv; using namespace cv::ximgproc; using namespace std; int main(int argc, char *argv[]) { cv::Mat Image_Left = cv::imread("left_3.png"); cv::Mat Image_Right = cv::imread("right_3.png"); cv::Mat M1 = (cv::Mat_<double>(3, 3) << 7986.2559620260, 0.0000000000, 524.7794558939, 0.0000000000, 7603.3099586941, 765.6466654278, 0.0000000000, 0.0000000000, 1.0000000000); cv::Mat D1 = (cv::Mat_<double>(1, 5) << -0.0626244338, -23.0384673454, 0.0000000000, 0.0000000000, 0.0000000000); cv::Mat M2 = (cv::Mat_<double>(3, 3) << 7789.0835738047, 0.0000000000, 2085.4988788672, 0.0000000000, 7523.3700278846, 271.1883527428, 0.0000000000, 0.0000000000, 1.0000000000); cv::Mat D2 = (cv::Mat_<double>(1, 5) << 0.2407018952, -7.8745465803, 0.0000000000, 0.0000000000, 0.0000000000); cv::Mat Q = (cv::Mat_<double>(4, 4) << 1, 0, 0, -2.8951307125091553e+03, 0, 1, 0, -5.0271924400329590e+02, 0, 0, 0, 7.5633399932893499e+03, 0, 0, 2.0857193103842788e+00, 0); cv::Rect RectLeft=cv::Rect(1080,890, 300,290); //Доска на левом фото cv::Rect RectRight=cv::Rect(880, 890,300,290); //Доска на правом фото cv::Point3f P3f(RectLeft.x, RectRight.y, abs(RectLeft.x - RectRight.x)); std::vector<cv::Point3f> input; std::vector<cv::Point3f> output; input.push_back(P3f); cv::perspectiveTransform(input, output, Q); std::cout << output[0] <<std::endl; std::cin.get(); return 0; }
Результат:
XYZ: [-4.35133, 0.928411, 18.1313]
Второй алгоритм:
Расстояние рассчитываю по формуле:
Расстояние = (Расстояние между камерами (мм) × фокусное расстояние) / карта несоответствия (disparity)
Фокусное расстояние = Q[2][3]
Расстояние между камерами (мм) = 1/Q[3][2] =0,5 м
Для расчёта disparity (в том числе отфильтрованной) использую пример:
https://docs.opencv.org/master/d3/d14/tutorial_ximgproc_disparity_filtering.htmlКод:
#include <iostream> #include <vector> #include <stdint.h> #include <string> #include <fstream> #include "opencv2/calib3d/calib3d.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" #include "opencv2/core/utility.hpp" #include <opencv2/calib3d.hpp> #include "opencv2/ximgproc.hpp" #include <stdio.h> using namespace cv; using namespace cv::ximgproc; using namespace std; //https://docs.opencv.org/master/d3/d14/tutorial_ximgproc_disparity_filtering.html int main(int argc, char** argv) { cv::Mat M1 = (cv::Mat_<double>(3, 3) << 7986.2559620260, 0.0000000000, 524.7794558939, 0.0000000000, 7603.3099586941, 765.6466654278, 0.0000000000, 0.0000000000, 1.0000000000); cv::Mat D1 = (cv::Mat_<double>(1, 5) << -0.0626244338, -23.0384673454, 0.0000000000, 0.0000000000, 0.0000000000); cv::Mat M2 = (cv::Mat_<double>(3, 3) << 7789.0835738047, 0.0000000000, 2085.4988788672, 0.0000000000, 7523.3700278846, 271.1883527428, 0.0000000000, 0.0000000000, 1.0000000000); cv::Mat D2 = (cv::Mat_<double>(1, 5) << 0.2407018952, -7.8745465803, 0.0000000000, 0.0000000000, 0.0000000000); cv::Mat Q = (cv::Mat_<double>(4, 4) << 1, 0, 0, -2.8951307125091553e+03, 0, 1, 0, -5.0271924400329590e+02, 0, 0, 0, 7.5633399932893499e+03, 0, 0, 2.0857193103842788e+00, 0); cv::Mat left = cv::imread("left_3.bmp"); cv::Mat right = cv::imread("right_3.bmp"); //Устраняем дисторсию cv::Mat tmp1, tmp2; cv::undistort(left, tmp1, M1, D1); cv::undistort(right, tmp2, M2, D2); left = tmp1; right = tmp2; cv::Mat left_for_matcher, right_for_matcher; //int numberOfDisparities = 160; int max_disp= 160; max_disp/=2; if(max_disp%16!=0) max_disp += 16-(max_disp%16); float scale = 2; resize(left ,left_for_matcher ,Size(),scale,scale, INTER_LINEAR_EXACT); resize(right,right_for_matcher,Size(),scale,scale, INTER_LINEAR_EXACT); Ptr<StereoBM> left_matcher = StereoBM::create(max_disp,5); /* left_matcher->setPreFilterCap(31); left_matcher->setBlockSize(31); left_matcher->setMinDisparity(0); left_matcher->setNumDisparities(numberOfDisparities); left_matcher->setTextureThreshold(10); left_matcher->setUniquenessRatio(15); left_matcher->setSpeckleWindowSize(100); left_matcher->setSpeckleRange(32); left_matcher->setDisp12MaxDiff(1);*/ auto wls_filter = createDisparityWLSFilter(left_matcher); Ptr<StereoMatcher> right_matcher = createRightMatcher(left_matcher); cvtColor(left_for_matcher, left_for_matcher, COLOR_BGR2GRAY); cvtColor(right_for_matcher, right_for_matcher, COLOR_BGR2GRAY); cv::Mat left_disp, right_disp, filtered_disp; left_matcher->compute(left_for_matcher, right_for_matcher,left_disp); right_matcher->compute(right_for_matcher,left_for_matcher, right_disp); wls_filter->setLambda(8000); wls_filter->setSigmaColor(1.5); wls_filter->filter(left_disp,left_for_matcher,filtered_disp,right_disp); Mat raw_disp_vis; double vis_mult = 1; cv::ximgproc::getDisparityVis(left_disp,raw_disp_vis,vis_mult); namedWindow("raw disparity", WINDOW_NORMAL); imshow("raw disparity", raw_disp_vis); Mat filtered_disp_vis; getDisparityVis(filtered_disp,filtered_disp_vis,vis_mult); namedWindow("filtered disparity", WINDOW_NORMAL); imshow("filtered disparity", filtered_disp_vis); std::cout << filtered_disp_vis.size() <<std::endl; resize(filtered_disp_vis ,filtered_disp_vis ,Size(),1/scale,1/scale, INTER_LINEAR_EXACT); std::cout << filtered_disp_vis.size() <<std::endl; cv::Point p(1200,900); //Берём произвольную точку на доске filtered_disp_vis.convertTo(filtered_disp_vis, CV_32F); float fDisp = filtered_disp_vis.at<float>(p.y, p.x); //Расчёт расстояния float distance = Q.at<double>(2, 3)*(1./ Q.at<double>(3, 2))/fDisp; std::cout << "Distance = " << distance << std::endl; cv::imwrite("filtered_disp_vis.png", filtered_disp_vis); waitKey(); return 0; }
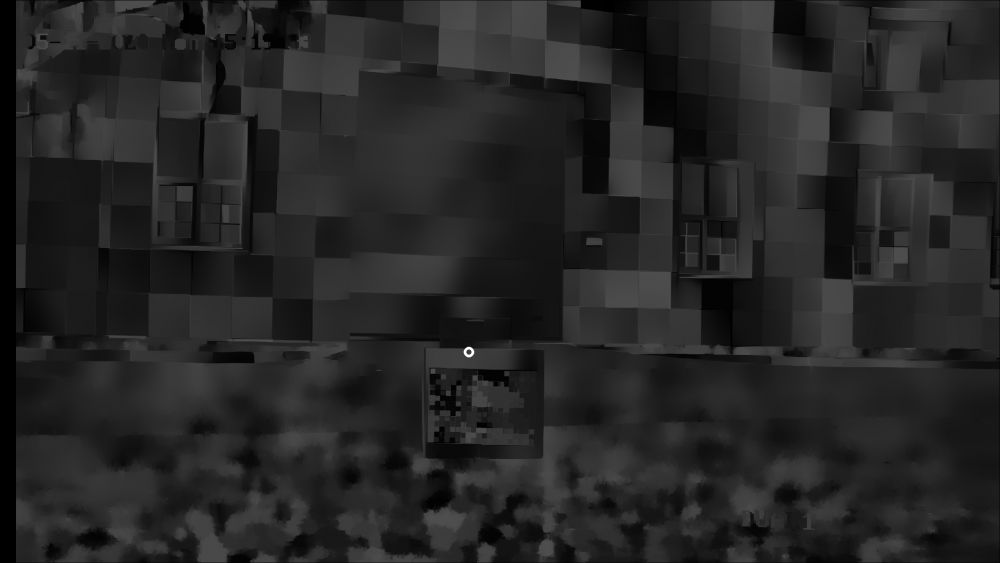
Disparity:
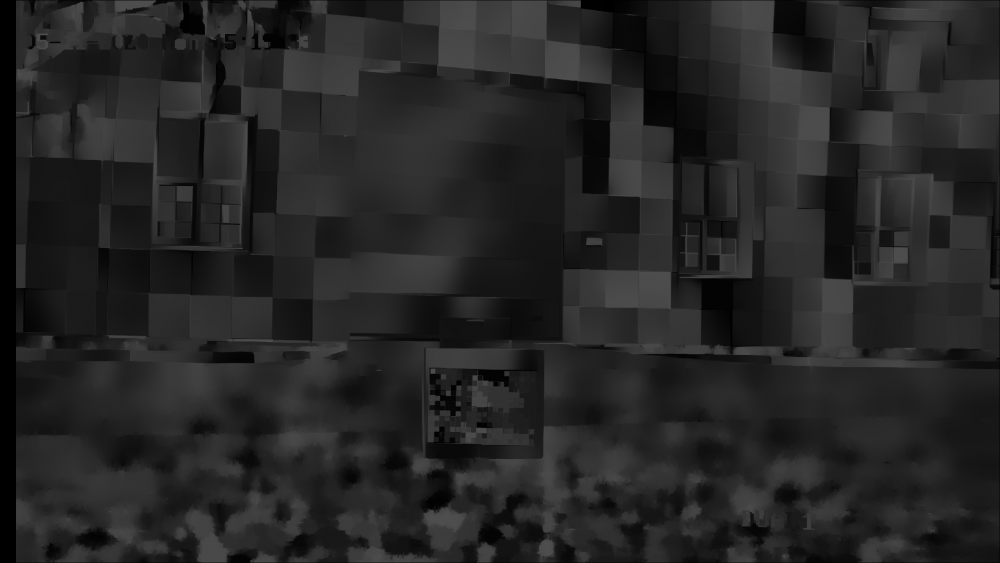
Результат: 57.55Расположение точки:
-
 1
1
-
-
Добрый день!
У меня возникли вопросы при расчёте дистанции до объекта по двум камерам в OpenCV.
Калибровку камер выполнил в Matlab Stereo Camera Calibrator App (в OpenCV возникли проблемы) и затем сохранил параметры в формате OpenCV с помощью:
https://github.com/JinyongJeong/StereoCalibration_matlab2opencv
Получил матрицы: R1, R2, P1, P2, Q, R, T, M1, M2, D1, D2.
При использовании алгоритма:
https://github.com/mixr26/stereo_vision
cv::Rect RectLeft=cv::Rect(1190,960,550,450); //Объект на левом кадре cv::Rect RectRight=cv::Rect(790,960,550,450); //Объект на правом кадре cv::Point3f P3f(RectLeft.x, RectRight.y, abs(RectLeft.x - RectRight.x)); std::vector<cv::Point3f> input; std::vector<cv::Point3f> output; input.push_back(P3f); //X, Y and Z coordinates of a real-world object cv::perspectiveTransform(input, output, Q); std::cout << output[0] <<std::endl;
получаю значение X, Y, Z
[-2.04382, 0.548109, 9.06563] – Не совсем понятно, как перевести эти значения в метры.
При использовании другого алгоритма, в котором рассчитывается карта глубины, получаю некорректные значения дистанции (в то числе, отрицательные).
cv::Mat img1 = cv::imread("left_12.bmp", 1); cv::Mat img2 = cv::imread("right_12.bmp", 1); Size img_size = img1.size(); Ptr<StereoSGBM> sgbm = StereoSGBM::create(0,16,3); int numberOfDisparities = 64; //известно cv::Mat M1, D1, M2 D2 Q R1, R2, P1, P2, R, T; //устраняем дисторсию Mat img1r, img2r; cv::undistort(img1, img1r, M1, D1); cv::undistort(img2, img2r, M2, D2); img1 = img1r; img2 = img2r; numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width/8) + 15) & -16; sgbm->setPreFilterCap(63); int sgbmWinSize = 3; sgbm->setBlockSize(sgbmWinSize); int cn = img1.channels(); sgbm->setP1(8*cn*sgbmWinSize*sgbmWinSize); sgbm->setP2(32*cn*sgbmWinSize*sgbmWinSize); sgbm->setMinDisparity(0); sgbm->setNumDisparities(numberOfDisparities); sgbm->setUniquenessRatio(10); sgbm->setSpeckleWindowSize(100); sgbm->setSpeckleRange(32); sgbm->setDisp12MaxDiff(1); Mat disp, disp8, disp32; sgbm->compute(img1, img2, disp); // compute the real-world distance [mm] //distance = (baseline * focal length) / disparity //Q (output from stereoRectify). Q[2][3] = focal length, 1/Q[3][2] = baseline. float fMaxDistance = static_cast<float>((1. / Q.at<double>(3, 2)) * Q.at<double>(2, 3)); disp.convertTo(disp32, CV_32F); auto outputDisparityValue = disp32.at<float>(1200,1200); // DISP_SCALE = 16 float fDisparity = outputDisparityValue / cv::StereoMatcher::DISP_SCALE; float fDistance = fMaxDistance / fDisparity; std::cout << "Distance = " <<fDistance <<std::endl;
В чём может быть проблема?



Расчёт дистанции до объекта
в OpenCV
Опубликовано · Report reply
Интересно, благодарю!