Когда использовал шахматный эталон - всё было ок, пока он был целиком в кадре, но висло намертво, когда часть эталона оказывалась вне кадра, пытаюсь сделать с кругами, пишут вроде что алгоритм более устойчивый, но он просто не находит цель, если не уменьшать размер изображения (примерно до 1024*768). Шаблон генерил с помощью скриптов OpenCV, пытался и симметричный и асимметричный использовать. Можно ли что-то сделать, чтобы нормально находить эталон на большом кадре? Или надо сильно уменьшать изображение, находить цель, потом брать базовое изображение, умножать все найденные координаты на коэффициент, с которым уменьшали изображение и запускать findCornersSubPix?

Проблема с поиском эталонов для калибровки камеры
в OpenCV
Опубликовано · Report reply
Пытаюсь калибровать камеру на предмет дисторсии по вот этому мануалу
https://docs.opencv.org/4.3.0/d4/d94/tutorial_camera_calibration.html
Когда использовал шахматный эталон - всё было ок, пока он был целиком в кадре, но висло намертво, когда часть эталона оказывалась вне кадра, пытаюсь сделать с кругами, пишут вроде что алгоритм более устойчивый, но он просто не находит цель, если не уменьшать размер изображения (примерно до 1024*768). Шаблон генерил с помощью скриптов OpenCV, пытался и симметричный и асимметричный использовать. Можно ли что-то сделать, чтобы нормально находить эталон на большом кадре? Или надо сильно уменьшать изображение, находить цель, потом брать базовое изображение, умножать все найденные координаты на коэффициент, с которым уменьшали изображение и запускать findCornersSubPix?
Асимметричный эталон использовал вот этот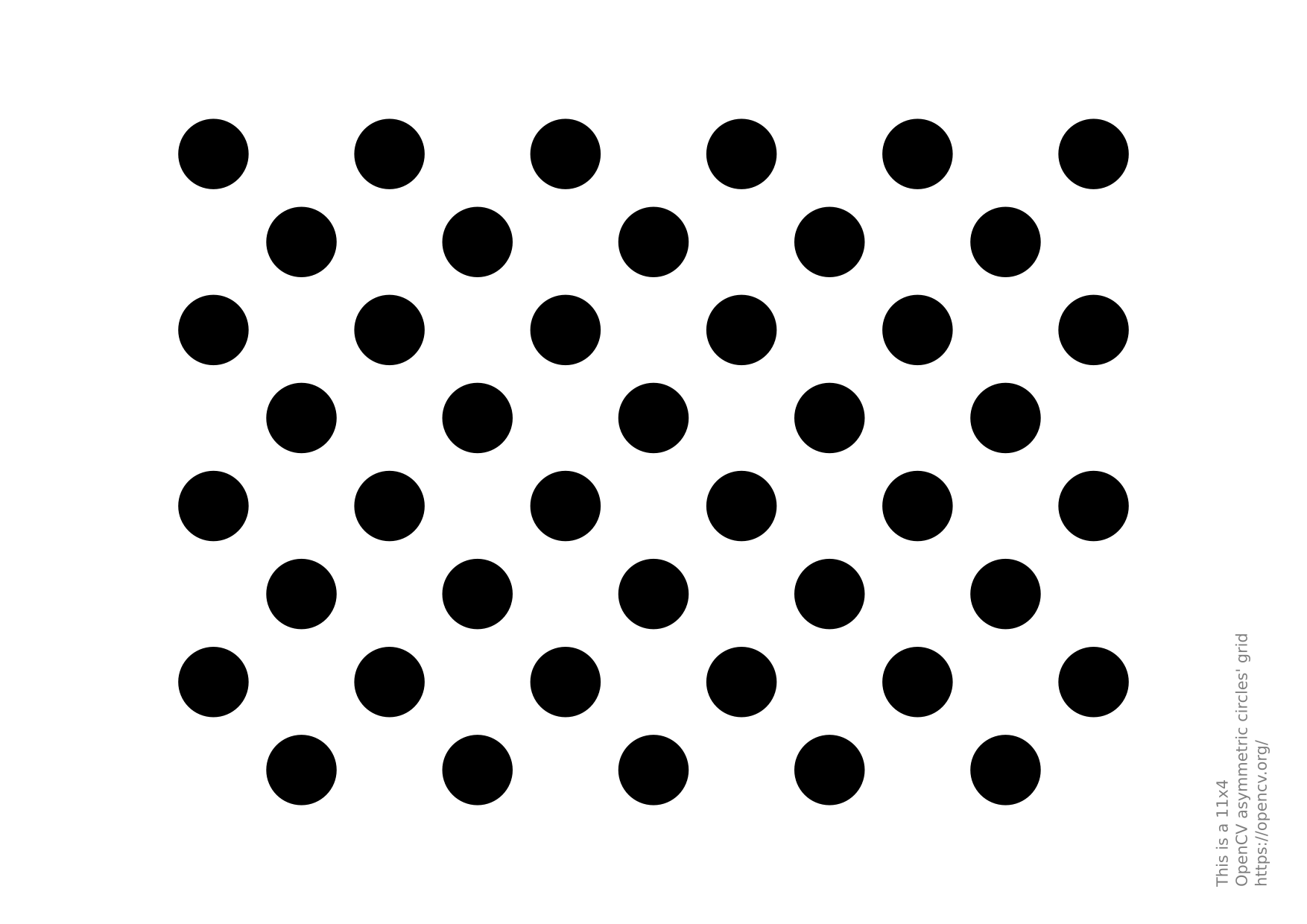
Код вот такой: