
kazanOpenCV
-
Количество публикаций
27 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные пользователем kazanOpenCV
-
-
kilop, мне нужно чтобы прямые участки контура представлялись не поточечно, а отрезками, как раз для этого использую CV_CHAIN_APPROX_SIMPLE.
Smorodov, а как мне тип связности поменять на 4?
-
Доброго времени суток,
возникла проблема с findContours. Вопрос в следующем:
есть квадрат: contours[1]([4]({x=10 y=10 },{x=110 y=10 },{x=110 y=110 },{x=10 y=110 })).
Рисуем его на белом фоне черным цветом с черной заливкой. Убираем грани, т.е. уменьшаем каждую сторону квадрата на толщину 1 пиксел.
С помощью cv::findContours( empty_image, contours_optimized,CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE); находим все контура на картинке, получаем:
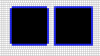
[0] [8]({x=10 y=11 },{x=11 y=10 },{x=109 y=10 },{x=110 y=11 },{x=110 y=109 },{x=109 y=110 },{x=11 y=110 },{x=10 y=109 }) - искомый контур.
[1] [4]({x=1 y=1 },{x=1 y=1078 },{x=1918 y=1078 },{x=1918 y=1 }) - контур по периметру картинки
Вопрос, почему найденный контур [8]({x=10 y=11 },{x=11 y=10 },{x=109 y=10 },{x=110 y=11 },{x=110 y=109 },{x=109 y=110 },{x=11 y=110 },{x=10 y=109 }) отличается от [4]({x=10 y=10 },{x=110 y=10 },{x=110 y=110 },{x=10 y=110 })??
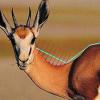
Т.е почему он находит контур как на рис.1, а не как на рис.2 строгий квадрат?
-
Smorodov, спасибо за очередную порцию полезных идей.
По п.0) если умножить все значения, например на 10, то разве "прыжков" станет меньше? Или же усиливать только "окрестности" значений, соответствующих началу и концу отрезка.
По поводу п.1) можно поподробнее? не совсем понял.
-
Всем доброго времени суток,
на картинке слева результат работы Gimp'а, справа моего алгоритма.
Пока еще дорабатываю, остаются вопросы по скорости и по детализации мелких деталей. Вообщем есть большое поле для оптимизации.
Smorodov, mrgloom большое вам спасибо за ощутимую помощь, думаю еще возникнут вопросы и не раз)

-
mrgloom, спасибо, посмотрю.
Первая ссылка в любом случае мне помогла в плане понимания.
-
Пришла в голову идея определять вес ребра, соединяющего 2 пикселя, как Weight ((i,j); (i1,j1))=(Max - 1/2*(img(i,j)+img(i1,j1)))*koef;
koef=sqrt(2) для диагональных ребер, =1 для верикальных и горизонтальных ребер. Max-для grayscale =255, для чернобелого изображения =1.
Возможно в этом случае кратчайший путь будет идти по границе, а не скакать по диагоналям как на рисунке 1 в посте №32.
-
так зачем до всех остальных то искать? надо же всего между двумя точками найти.
mrgloom, так Dijkstra, насколько, я понял работает именно перебором всех узлов графа.
Если координаты концов отрезка (x1,y1)-(x2,y2), то получается прямоугольный граф с количеством узлов N=(x2-x1+1)*(y2-y1+1)
и количеством ребер L=(x2-x1-1)*(y2-y1-1)*8+ //серединные пиксели - у них по 8 связей со всеми остальными
+(width-2)*2*5+(height-2)*2*5+ //краевые пиксели без угловых - у них по 5 связей со всеми остальными
+4*3; //угловые пиксели - у них по 3 связи со всеми остальными
Upd. Единственное, можно остановиться когда дойдем до узла, соответствующего концу отрезка, но как много узлов будет уже посещено до этого зависит
от характера картинки. Но в среднем, конечно это ускорит выполнение алгоритма.
-
Smorodov, да, я использую кусок исходного изображения соответствующий отрезку.
Исходник на CUDA смотрел, но там нужно подключать Boost Graph Library, не хотелось бы.
Пока реализовал сам на основе кода с priority_queue, выкладываю программу, если будет время посмотрите, пожалуйста.
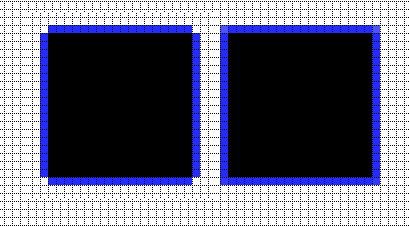
Там небольшая проблемка (см. приложенный рисунок). На рисунке тестовое изображение 10x10 пикселов. Черная горизонтальная полоса на уровне второго пиксела сверху на белом фоне.
Граф состоит из 100 вершин. Веса для соединяющих ребер нахожу как в http://www.cs.washington.edu/education/courses/cse455/02wi/projects/project1/project1.htm (см. рис.2).
В итоге кратчайший путь из 10 вершины в 9 определяется как показано красной линией (т.е. путь из номеров пикселов 10-1-12-3-14-5-16-7-18).
Вероятно я что то делаю не так.


-
Для куска изображения размером 200x200 пикселов (количество вершин графа 40 000),
время выполнения алгоритма поиска кратчайшего пути от заданной точки до всех остальных ~25 секунд.
Что-то многовато. Если 1920x1080 то совсем долго будет.
Как же, интересно, реализуют подобные алгоритмы в gimp или photoshope.
Smorodov, mrgloom, может быть есть соображения по оптимизации?
-
Smorodov, спасибо за ссылку.
Нашел вот такой алгоритм Дейкстры.
он ищет минимальную "стоимость пути" от исходного узла до всех узлов.
Чтобы сформировать цепочку из узлов я добавил код с комментарием //kazanOpenCV 18.02.2013.
Еще не проверял, вечером попробую скомпилировать.
#include <cstdio> #include <queue> #include <vector> using namespace std; #define MAX 100001 #define INF (1<<20) #define DEBUG if(0) #define pii pair< int, int > #define pb(x) push_back(x) struct comp { bool operator() (const pii &a, const pii &B )/>/>/>/> { return a.second > b.second; } }; priority_queue< pii, vector< pii >, comp > Q; vector< pii > G[MAX]; int D[MAX]; bool F[MAX]; int main() { int i, u, v, w, sz, nodes, edges, starting; //kazanOpenCV 18.02.2013 vector<vector<int> > e; DEBUG freopen("in.txt","r", stdin); // create graph scanf("%d %d", &nodes, &edges); for(i=0; i<edges; i++) { scanf("%d %d %d", &u, &v, &w); G[u].pb(pii(v, w)); G[v].pb(pii(u, w)); // for undirected } scanf("%d", &starting); // initialize graph for(i=1; i<=nodes; i++) D[i] = INF; //kazanOpenCV 18.02.2013 for(i=1; i<=nodes; i++) e.push_back(vector<int>()); - начальное заполнение массива векторов пустыми векторами D[starting] = 0; Q.push(pii(starting, 0)); // dijkstra while(!Q.empty()) { u = Q.top().first; Q.pop(); if(F[u]) continue; sz = G[u].size(); DEBUG printf("visiting from %d:", u); for(i=0; i<sz; i++) { v = G[u][i].first; w = G[u][i].second; if(!F[v] && D[u]+w < D[v]) { DEBUG printf(" %d,", v); D[v] = D[u] + w; //kazanOpenCV 18.02.2013 //std::vector<int> newvector(oldvector); -копирование одного вектора в другой std::vector<int> e[v](e[u]);//-копирование одного вектора в другой // vector<vector<int> > e; // e.push_back(vector<int>()); e[v].push_back(u);//вставка элемента u в конец цепочки узлов в пути Q.push(pii(v, D[v])); } } DEBUG printf("\n"); F[u] = 1; // done with u } // result for(i=1; i<=nodes; i++) printf("Node %d, min weight = %d\n", i, D[i]); return 0; } -
Smorodov, спасибо, сейчас занимаюсь как раз этим!
-
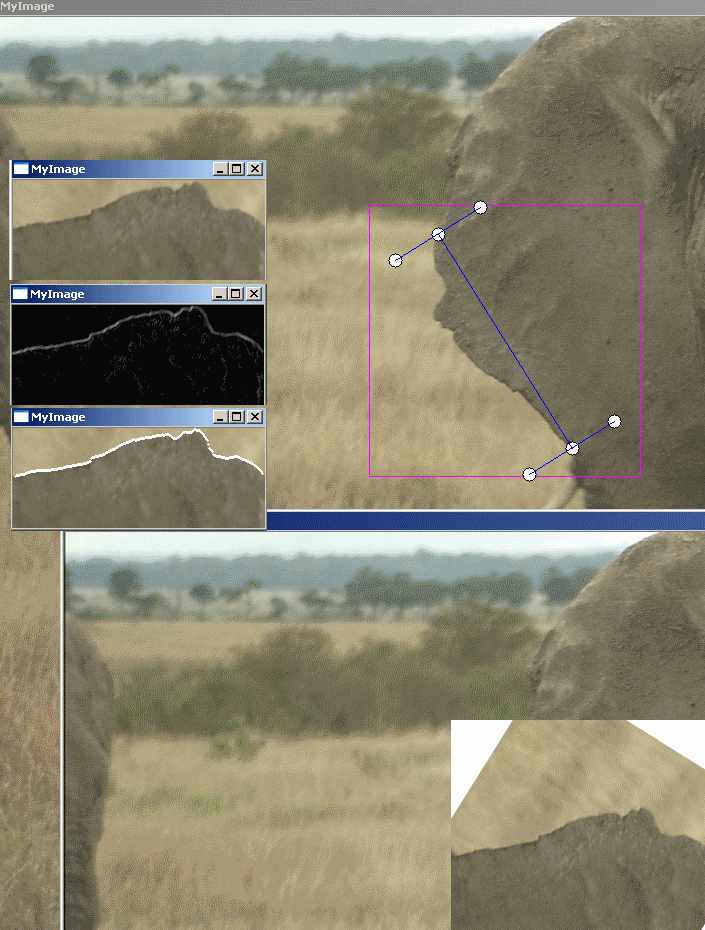
Добрый день, на скриншоте результат - третье маленькое окно сверху с белым контуром.
Белый контур - это попиксельно найденный c помощью Sobel.
Есть проблема когда в фрагменте несколько ощутимызх перепадов яркости, как быть в этом случае?
Нужно искать максимум по каким-то критериям.
Вообщем застопорился.

-
mrgloom, спасибо за ощутимую помощь и внимание к теме.
-
Вот презентация, которую я делал к лекции, надеюсь поможет разобраться с границами:
Smorodov, спасибо.
-
mrgloom, я уже замучил)
запутался с Sobel, как правильно применить ее к моему случаю?
Если я правильно понял, у нас есть матрица-столбец (фактически прямий отрезок состоящий из Grayscale точек [1..N]), как к ней применить Sobel?
-
"Спустился" до уровня отдельных пикселов.
Как задать некую аггрегатную характеристику (учитывающую в общем случае яркость, цветность и т.п.) отдельного пикселя, чтобы сравнивать между их собой, проходя вдоль линии?
Соответственно, найдя глобальный максимум на линии, можно предположить, что именно там и есть граница.
-
ок, теперь понятно)
-
mrgloom, идея с поворотом на угол понравилась, но не совсем понял насчет заморочки с линией, можно поподробнее?
-
mrgloom, а как средствами OpenCV определить перепад яркости двух точек?
Перевести изображение в HSV и использовать значение V?
-
Всем доброго времени суток!
Спасибо Smorodov и mrgloom за идеи.
Smorodov, змеи предполагают замкнутый начальный контур? Если так то не совсем подходит.
Продолжаю "копать" в этом направлении.
Набросал алгоритм, прошу высказать идеи и замечания.
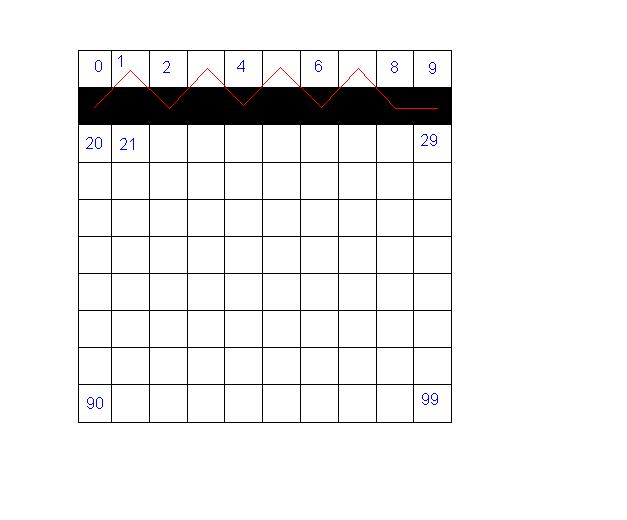
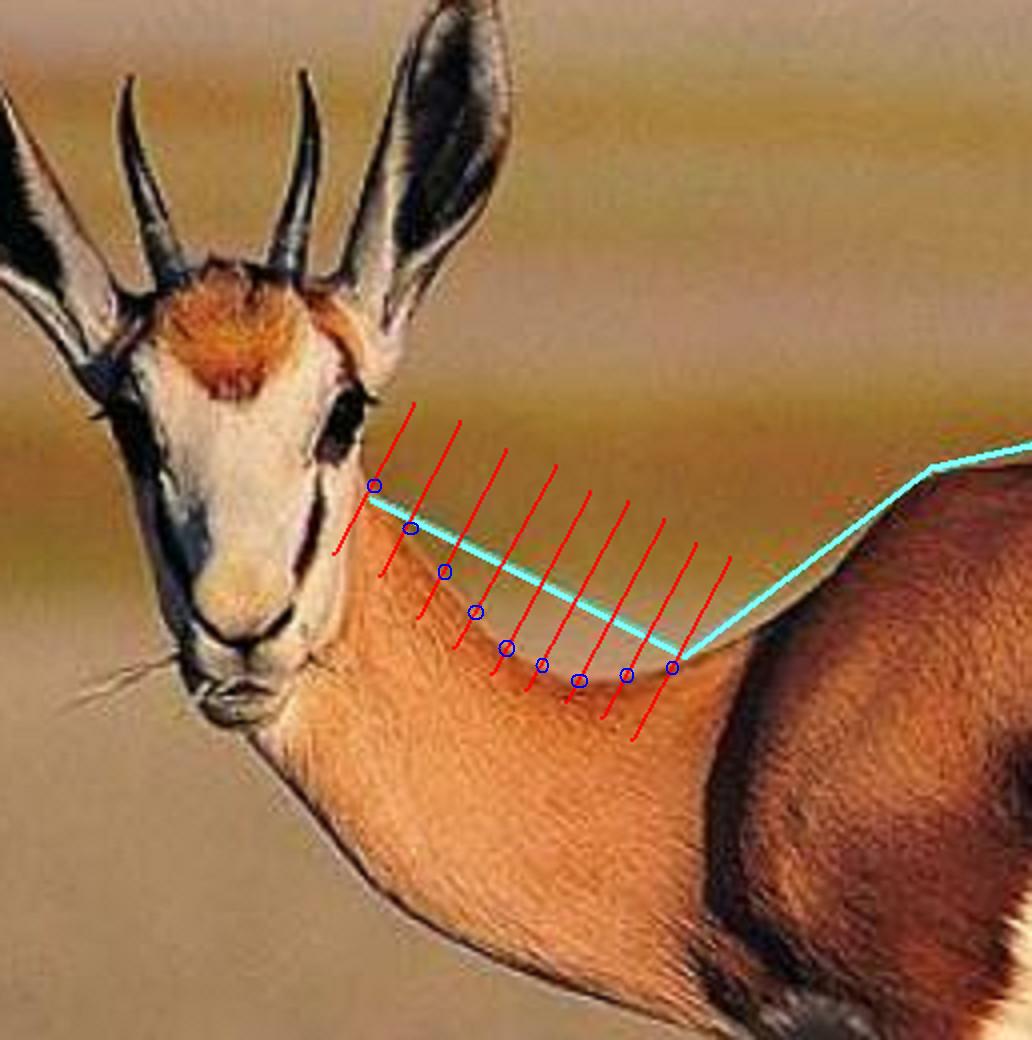
Итак, есть исходная картинка (рис.1)
Далее вручную (мышью) задается грубый ломаный контур (в общем случае незамкнутый) для определенного объекта на картинке (например, в нашем случае - часть верхнего контура антилопы).Рис.2.
Задается максимальная удаленность (d1) от отрезка исходного грубого контура и точность (d2) - частота точек на уточненном контуре.
Затем необходимо найти уточненный контур исходя из заданного грубого контура и критериев d1 и d2.
Предполагается следующий алгоритм:
1) Ограничиваю область поиска прямоугольной областью, описывающую исходный грубый ломаный контур - minAreaRect.
2) перевод в градации серого
3) размытие (?)
4) adaptiveThreshold
5) FindContours
6) строим перпендикулярные прямые (в обе стороны на длину d1) на каждом отрезке исходного грубого контура (через расстояние d2) и ищем пересечение с найденными в п.5. контурами (?) - рис.3 Далее также по каждому отрезку.
7) Объединяем найденные точки в единый уточненный контур.
В чем могут быть подводные камни и как лучше реализовать алгоритм?


-
kazanOpenCV был вроде такой алгоритм для задач трекинга объектов - но в полвторого ночи мой склероз отказывается вспоминать его название
Victor, я могу подождать светлого времени суток)
-
mrgloom, есть исходный кадр (например, как в первом посте, в котором есть какие-то объекты), задается грубый контур в виде набора точек (передается извне),
также задается расстояние между точками уточненного контура, а также максимальное удаление точки уточненного контура от исходного грубого.
Соответственно, нужно на выходе получить уточненный контур с требуемыми параметрами. Приблизительно так.
-
а встроенные в OpenCV grabcut и watershed могут помочь?
-
Спасибо за быстрый ответ.
Буду изучать в указанных направлениях и отписываться в теме с идеями и вопросами, если никто не против





Вопрос по findContours
в OpenCV
Опубликовано · Report reply
mrgloom, так я и использовал CV_CHAIN_APPROX_SIMPLE, чтобы исключить ручную обработку точек контура на предмет исключения прямых отрезков.