
kirviza
-
Количество публикаций
18 -
Зарегистрирован
-
Посещение
-
Days Won
1
Сообщения, опубликованные пользователем kirviza
-
-
Вот то что вы скинули я так понял это готовые программы уже, или это алгоритмы реализованные на opencv?просто на работе по заданию мне надо сшить сетку-матрицу изображений, я вроде бы сшиваю но все равно видны швы.а вопрос с памятью решился))спасибо за это.
-
ну по сути как панорама, я и загружаю всего 2 изображения в цикле, дело думаю в реалайзе))спасибо большое, завтра попробую)
-
Короче, ребята такая тема.Суть задания в том что есть матрица изображений 14х12. мне надо в .txt записать координаты каждого изображения, которые описывают где бы оно находилось если бы все изображения объеденить в одно. Изображения накладываются друг на друга. Но вопрос не в opencv. А в другом. Когда я загружаю матрицу изображений допусти 5х5 то все хорошо. А когда уже 14х12 то программа до конца не доходит, из за нехватки памяти.В скринах увидите что перегруз. Как избавится от этого.Я просто с памятью работать не умею. А форум тут хороший, нравится очень.скрины расположены по порядку, от начала запуска проги, и в середине, и ближе к вылету ошибки.



-
разрешение изображений 1368х1023, между ними идет перекрытие пикселей 100-150, около этого.Как я использовал мачинг, я приблизительно знаю где будет прекрытие, из второго изображения вырезал эту небольшую часть, потом узнавал координаты где оно должно стоять на первом изображении а затем присоединял второе изображение к первому.Просто хочу понять как работает фазовая корреляциия, и почему мой код не работает а жалуется на типы данных, вроде бы все одного типа.
-
да вроде все хорошо по типу, в коде вроде все одного типа, я только .png на .jpg поменял
-
вот ошибка вылетает
и по размерам все одинаковое,старался делать все как по примеру

-
я его и взял за основу, просто теперь хочу переделать что бы не с видео было все, а просто изображения загружались с компа и находило смещение
-
вот исправил но теперь ругается на размер изображения 2
#include "stdafx.h" #include <stdio.h> #include <iostream> #include <cv.h> #include "opencv2/core/core.hpp" #include "opencv2/features2d/features2d.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/nonfree/nonfree.hpp" using namespace cv; using namespace std; int main(int, char* []) { Mat hann,img164f,img264f; Mat img1=imread("image1.png",0); Mat img2=imread("image2.png",0); createHanningWindow(hann, img2.size(),CV_64F); cout<<"ok1"<<endl; img1.convertTo(img164f, CV_64F); img2.convertTo(img264f, CV_64F); Point2d shift = phaseCorrelate(img164f, img264f, hann); cout<<" "<<shift.x<<" "<<shift.y<<endl; cvWaitKey(0); return 0; } -
и что это значит?теорию я тоже нашел только не понимаю что это.
-
Не могу найти ошибку, код маленький но что то туплю.
#include "stdafx.h" #include <stdio.h> #include <iostream> #include <cv.h> #include "opencv2/core/core.hpp" #include "opencv2/features2d/features2d.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/nonfree/nonfree.hpp" using namespace cv; using namespace std; int main(int, char* []) { Mat hann; Mat img1=imread("image1.jpg",0); Mat img2=imread("image2.jpg",0); createHanningWindow(hann, img2.size(), 0); cout<<"ok1"<<endl; Point2d shift = phaseCorrelate(img1, img2, hann); cout<<" "<<shift.x<<" "<<shift.y<<endl; cvWaitKey(0); return 0; }просто надо посчитать смещение) я сделал тоже самое через cvMatchTemplate.
суть задания это объединить матрицу изображений 12х14, они накладываются друг на друга по оси Х и по оси У.
cvMatchTemplate работает хорошо, но когда много изображений то получаются небольшие сдвиги.А мне 4-5 пикселей это уже большое смещение.
хотел разобраться с этой функцией, мб она лучше работать будет)
Подскажите что тут не так
-
все разобрался,проблема была в самом opencv, в версии. спасибо огромное. зато теперь шарю как библиотеки подключать и что куда тыкать.А то я сами алгоритмы могу немного реализовывать а как что устроенно не знал. даже не знаю как отблагодарить вас.Буду теперь постоянно на форуме у вас зависать и стараться так же помогать другим))если знания будут позволять)
-
 1
1
-
-
исправил ошибку с загрузкой изображений просто imread поменял на cvLoadImage,
теперь другая ошибка, при запуске вылетает как только доходит до
int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 ); detector.detect( img_2, keypoints_2 );
в чем тут проблема уже? я наверное скоро повешусь, мне интересно зачем такие учебники делать, или я слишком тупой. причем беру так же пример matching_simple.cpp там те же самые ошибки выводит. вот весь код исправленный что теперь в нем не так#include "stdafx.h" #include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #include "opencv2/core/gpumat.hpp" #include "opencv2/core/opengl_interop.hpp" #include "opencv2/ml/ml.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/contrib/contrib.hpp" #include "opencv2/video/tracking.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/nonfree/nonfree.hpp" using namespace cv; int main( int argc, char** argv ) { Ptr<IplImage> img1 = cvLoadImage("image1.jpg", CV_LOAD_IMAGE_GRAYSCALE); Ptr<IplImage> img2 = cvLoadImage("image2.jpg", CV_LOAD_IMAGE_GRAYSCALE); if(img1.empty() || img2.empty()) { printf("Can't read one of the images\n"); return -1; } Mat img_1(img1); Mat img_2(img2); //-- Step 1: Detect the keypoints using SURF Detector int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 ); detector.detect( img_2, keypoints_2 ); //-- Step 2: Calculate descriptors (feature vectors) SurfDescriptorExtractor extractor; Mat descriptors_1, descriptors_2; extractor.compute( img_1, keypoints_1, descriptors_1 ); extractor.compute( img_2, keypoints_2, descriptors_2 ); //-- Step 3: Matching descriptor vectors using FLANN matcher FlannBasedMatcher matcher; std::vector< DMatch > matches; matcher.match( descriptors_1, descriptors_2, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints for( int i = 0; i < descriptors_1.rows; i++ ) { double dist = matches[i].distance; if( dist < min_dist ) min_dist = dist; if( dist > max_dist ) max_dist = dist; } printf("-- Max dist : %f \n", max_dist ); printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist ) //-- PS.- radiusMatch can also be used here. std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ ) { if( matches[i].distance < 2*min_dist ) { good_matches.push_back( matches[i]); } } //-- Draw only "good" matches Mat img_matches; drawMatches( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Show detected matches imshow( "Good Matches", img_matches ); for( int i = 0; i < good_matches.size(); i++ ) { printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); } waitKey(0); return 0; }что тут не так?помогите пожалуйста, или если есть рабочий пример такого же характера скиньте его. А то реально повешусь дня через 2))))
-
1
-
-
Вот я убрал эти строки, вот что оставил
#include "stdafx.h" #include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #include "opencv2/core/gpumat.hpp" #include "opencv2/core/opengl_interop.hpp" #include "opencv2/ml/ml.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/contrib/contrib.hpp" #include "opencv2/video/tracking.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/nonfree/nonfree.hpp" using namespace cv; int main( int argc, char** argv ) { Mat img_1 = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE ); Mat img_2 = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE ); if( !img_1.data || !img_2.data ) { std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 ); detector.detect( img_2, keypoints_2 ); //-- Step 2: Calculate descriptors (feature vectors) SurfDescriptorExtractor extractor; Mat descriptors_1, descriptors_2; extractor.compute( img_1, keypoints_1, descriptors_1 ); extractor.compute( img_2, keypoints_2, descriptors_2 ); //-- Step 3: Matching descriptor vectors using FLANN matcher FlannBasedMatcher matcher; std::vector< DMatch > matches; matcher.match( descriptors_1, descriptors_2, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints for( int i = 0; i < descriptors_1.rows; i++ ) { double dist = matches[i].distance; if( dist < min_dist ) min_dist = dist; if( dist > max_dist ) max_dist = dist; } printf("-- Max dist : %f \n", max_dist ); printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist ) //-- PS.- radiusMatch can also be used here. std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ ) { if( matches[i].distance < 2*min_dist ) { good_matches.push_back( matches[i]); } } //-- Draw only "good" matches Mat img_matches; drawMatches( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Show detected matches imshow( "Good Matches", img_matches ); for( int i = 0; i < good_matches.size(); i++ ) { printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); } waitKey(0); return 0; }все равно жалуется что не загруженны изображения, но почему они не загружены, я же чисто имена прописал и кинул их в корень проекта. я еще пробовал вместе imread писать cvLoadImage, так мне показывается что изображения считанны, но потом все равно вылетает ошибка
-
1
-
-
спасибо огромное, конечно все равно ничего не работает) но теперь хотя бы ошибки не выдает и разобрался с библиотеками, что и как.
теперь помогите решить последнюю проблему, просто по рабочей проге легче разобраться как работает каждая функция.
Вот код, что тут не так.
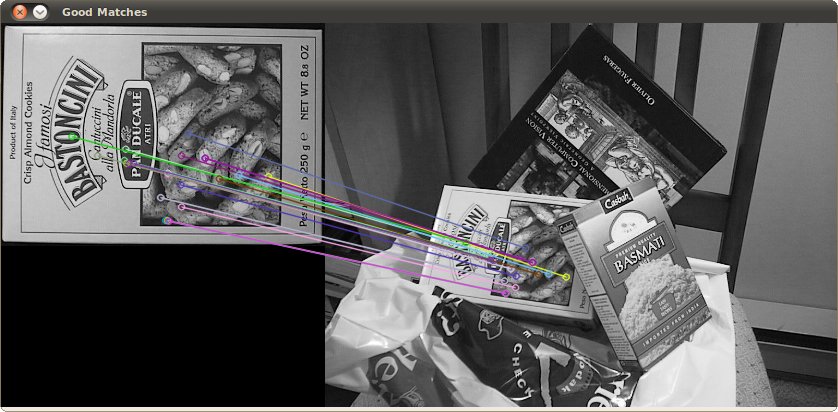
#include "stdafx.h" #include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #include "opencv2/core/gpumat.hpp" #include "opencv2/core/opengl_interop.hpp" #include "opencv2/ml/ml.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/contrib/contrib.hpp" #include "opencv2/video/tracking.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/nonfree/nonfree.hpp" using namespace cv; void readme(); /** @function main */ int main( int argc, char** argv ) { if( argc != 3 ) { readme(); return -1; } Mat img_1 = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE ); Mat img_2 = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE ); if( !img_1.data || !img_2.data ) { std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 ); detector.detect( img_2, keypoints_2 ); //-- Step 2: Calculate descriptors (feature vectors) SurfDescriptorExtractor extractor; Mat descriptors_1, descriptors_2; extractor.compute( img_1, keypoints_1, descriptors_1 ); extractor.compute( img_2, keypoints_2, descriptors_2 ); //-- Step 3: Matching descriptor vectors using FLANN matcher FlannBasedMatcher matcher; std::vector< DMatch > matches; matcher.match( descriptors_1, descriptors_2, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints for( int i = 0; i < descriptors_1.rows; i++ ) { double dist = matches[i].distance; if( dist < min_dist ) min_dist = dist; if( dist > max_dist ) max_dist = dist; } printf("-- Max dist : %f \n", max_dist ); printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist ) //-- PS.- radiusMatch can also be used here. std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ ) { if( matches[i].distance < 2*min_dist ) { good_matches.push_back( matches[i]); } } //-- Draw only "good" matches Mat img_matches; drawMatches( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Show detected matches imshow( "Good Matches", img_matches ); for( int i = 0; i < good_matches.size(); i++ ) { printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); } waitKey(0); return 0; } /** @function readme */ void readme() { std::cout << " Usage: ./SURF_FlannMatcher <img1> <img2>" << std::endl; }вот что должно получится (1 изображение)
я использую вот эти изображения (2,3 изображение)
и что мне выдает прога (4 изображение)
что не так тут, я не пойму)




-
1
-
-
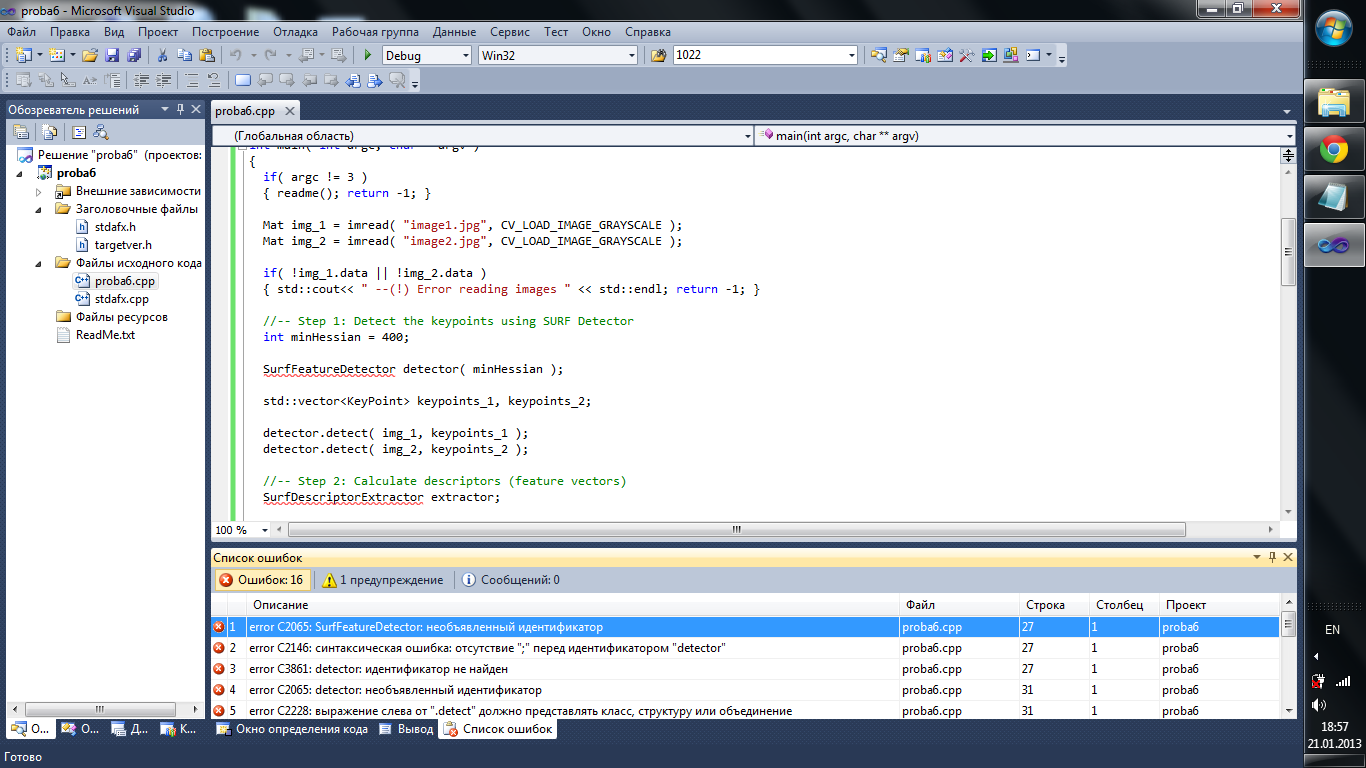
с этим разобрался, спасибо огромное но тут же возникла другая ошибка, почему то подчеркивает SurfFeatureDetector.вот внизу скрин.

-
1
-
-
дык lib файлы не все подключены
думаю что не хватает opencv_features2d249.lib
может быть еще opencv_nonfree249.lib, там surf.
так что подключить надо?я не пойму какой именно файл?наверное я глупый, просто их тут много с таким названием и у меня нет features2d249, есть тоже самое но 231
-
1
-
-
Ребята нужна помощь, я просто уже не знаю что делать, напишите в личку если не сложно http://vk.com/kirviza вот ссылка в контакте, просто расскажу в чем проблема заключается.По книжке я дошел до темы FEATURE2D MODULE. теперь когда подключаю библиотеки #include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp", они находятся нормально, но при этом когда запускаю прогу у меня выскакивают ошибоки.
error LNK2019: ссылка на неразрешенный внешний символ "public: __thiscall cv::SurfFeatureDetector::SurfFeatureDetector(double,int,int,bool)" (??0SurfFeatureDetector@cv@@QAE@NHH_N@Z) в функции _main
1>proba6.obj : error LNK2019: ссылка на неразрешенный внешний символ "public: virtual __thiscall cv::FeatureDetector::~FeatureDetector(void)" (??1FeatureDetector@cv@@UAE@XZ) в функции "public: virtual __thiscall cv::SurfFeatureDetector::~SurfFeatureDetector(void)" (??1SurfFeatureDetector@cv@@UAE@XZ)
1>proba6.obj : error LNK2019: ссылка на неразрешенный внешний символ "public: virtual __thiscall cv::DescriptorExtractor::~DescriptorExtractor(void)"
я не понимаю как с этим бороться это ужас какой-то, код просто вставил из учебника
#include "stdafx.h" #include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #include "opencv2/features2d/features2d.hpp" #include "opencv2/highgui/highgui.hpp" using namespace cv; void readme(); /** @function main */ int main( int argc, char** argv ) { if( argc != 3 ) { readme(); return -1; } Mat img_1 = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE ); Mat img_2 = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE ); if( !img_1.data || !img_2.data ) { std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 ); detector.detect( img_2, keypoints_2 ); //-- Step 2: Calculate descriptors (feature vectors) SurfDescriptorExtractor extractor; Mat descriptors_1, descriptors_2; extractor.compute( img_1, keypoints_1, descriptors_1 ); extractor.compute( img_2, keypoints_2, descriptors_2 ); //-- Step 3: Matching descriptor vectors using FLANN matcher FlannBasedMatcher matcher; std::vector< DMatch > matches; matcher.match( descriptors_1, descriptors_2, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints for( int i = 0; i < descriptors_1.rows; i++ ) { double dist = matches[i].distance; if( dist < min_dist ) min_dist = dist; if( dist > max_dist ) max_dist = dist; } printf("-- Max dist : %f \n", max_dist ); printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist ) //-- PS.- radiusMatch can also be used here. std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ ) { if( matches[i].distance < 2*min_dist ) { good_matches.push_back( matches[i]); } } //-- Draw only "good" matches Mat img_matches; drawMatches( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Show detected matches imshow( "Good Matches", img_matches ); for( int i = 0; i < good_matches.size(); i++ ) { printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); } waitKey(0); return 0; } /** @function readme */ void readme() { std::cout << " Usage: ./SURF_FlannMatcher <img1> <img2>" << std::endl; }все что в нем поменял это вместо аргументов сразу написал имена изображений
-
1
-






Нехватка памяти
в OpenCV
Опубликовано · Report reply
щас посмотрим)спасибо большое))