
Chemist
-
Количество публикаций
22 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные пользователем Chemist
-
-
спасибо, за наводку но какой формат выбрать все перебрал (http://msdn.microsoft.com/ru-ru/library/system.drawing.imaging.pixelformat.aspx)
подходит только Format8bppIndexed, но изображение вместо белого отдает в краснину
-
Перевел изображение в HSV, но перед выводом его в image оно не складывается
private: System::Void MainForm_Shown(System::Object^ sender, System::EventArgs^ e) { //Cam->capture = cvCreateCameraCapture(CV_CAP_ANY); capture = cvCreateCameraCapture(CV_CAP_ANY); if (capture != 0) { //проверяем наличие подключенных камер this->label4->Visible = false; //скрываем надписьCybSys... SettingForm->label7->Text = "Видеокамера включена!"; frame = cvQueryFrame( capture ); imageRGB = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3 ); hsv = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3 ); h_plane = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); s_plane = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); v_plane = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); h_range = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); s_range = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); v_range = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); hsv_and = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 1 ); // конвертируем в HSV cvCvtColor( frame, hsv, CV_BGR2HSV ); // разбиваем на отельные каналы cvCvtPixToPlane( hsv, h_plane, s_plane, v_plane, 0 ); if (OpenFileColor(R, G, == -1) { System::Windows::Forms::MessageBox::Show("Данные не были Прочитаны из файла!", "Ошибка чтения");} else { this->timer1->Start(); //запускаем таймер } } else { SettingForm->label7->Text = "Видеокамера не подключена!"; } } private: System::Void timer1_Tick(System::Object^ sender, System::EventArgs^ e) { myTrackbarHmin(SettingForm->hScrollBar1->Value); myTrackbarHmax(SettingForm->hScrollBar2->Value); myTrackbarHmin(SettingForm->hScrollBar3->Value); myTrackbarHmax(SettingForm->hScrollBar4->Value); myTrackbarHmin(SettingForm->hScrollBar5->Value); myTrackbarHmax(SettingForm->hScrollBar6->Value); //получаем кадр frame = cvQueryFrame( capture ); // конвертируем в HSV cvCvtColor( frame, hsv, CV_BGR2HSV ); // разбиваем на отельные каналы cvCvtPixToPlane( hsv, h_plane, s_plane, v_plane, 0 ); cvAnd(h_range, s_range, hsv_and); cvAnd(hsv_and, v_range, hsv_and); Bitmap^ bmpSetting = (gcnew System::Drawing::Bitmap(hsv_and->width, hsv_and->height, hsv_and->widthStep, System::Drawing::Imaging::PixelFormat::Format24bppRgb,(System::IntPtr)hsv_and->imageData)); SettingForm->pictureBox1->Image = bmpSetting;}[/code]п.с. на подписи скрол баров прошу внимания не обращать )

-
значит камера и подсветка сдесь особо не причем?
-
Да бы не городить новую тему, спрошу сдесь.
Перевожу в в монохромное с выделением нужного цвета вот таким образом:
IplImage* TreatmentImage::YellowInBlackAndWhite(IplImage* rgb ,int B, int G, int R){ int x, y; ptr = (uchar*)(rgb->imageData); for(x = 0; x<rgb->width-1; x++){ //преобразуем изображение с желтыми метками в монохромное for (y = 0; y<rgb->height-1; y++){ if ((ptr[3*x+y*rgb->widthStep] < && (ptr[3*x+1+y*rgb->widthStep] > G) && (ptr[3*x+2+y*rgb->widthStep] > R)) { ptr[3*x+y*rgb->widthStep] = 255; //H ptr[3*x+1+y*rgb->widthStep] = 255; //S ptr[3*x+2+y*rgb->widthStep] = 255; //V } else { ptr[3*x+y*rgb->widthStep] = 0; ptr[3*x+1+y*rgb->widthStep] = 0; ptr[3*x+2+y*rgb->widthStep] = 0; } } } return rgb; }[/code]прохо выделяется искомый цвет, и очень большое влияние оказывает внешнее освещение.
Подскажите как тут быть, менять камеру (на подобии Logitech Webcam C600) или городить подсветку?
-
Вроде то же разобрался, перенес за цикл.
-
Спасибо, с этим вроде разобрался, но теперь возникает другое исключение.
В ходе работы вот в этой строчке: imageRGB = cvCreateImage( cvSize(frame->width, frame->height), IPL_DEPTH_8U, 3 );
-
забыл добавить: пишу в VS C++ 2008
-
Без cvReleaseImage программа через некоторое время вылетает, но вся проблема в том что после прописания вот этой строчки -cvReleaseImage( &ImageRGB);, компилятор ругается - error C2664: cvReleaseImage: невозможно преобразовать параметр 1 из 'cli::interior_ptr<Type>' в 'IplImage **'
-
все оказалось проще )
ptr[3*x+y*frame->widthStep] // Синий
ptr[3*x+1+y*frame->widthStep] // Зеленый
ptr[3*x+2+y*frame->widthStep] // Красный
вот такое условие для нахождение красного цвета у меня получилось:
if ((ptr[3*x+y*frame->widthStep] < 40) && (ptr[3*x+1+y*frame->widthStep] < 30) && (ptr[3*x+2+y*frame->widthStep] > 150))
-
-
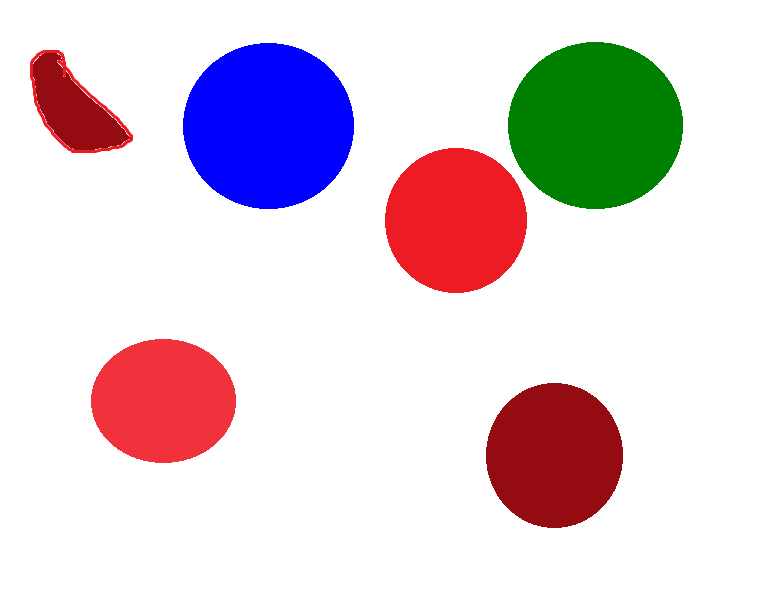
Не получается подобрать красный цвет, использую вот такой код:
for(x = 0; x<frame->width; x++){ for (y = 0; y<frame->height; y++){ if (((ptr[3*x+y*frame->widthStep] > this->hScrollBar1->Value-10) && (ptr[3*x+y*frame->widthStep] < this->hScrollBar1->Value+10)) && ((ptr[3*x+1+y*frame->widthStep] > this->hScrollBar2->Value-10) && (ptr[3*x+1+y*frame->widthStep] < this->hScrollBar2->Value+10)) && ((ptr[3*x+2+y*frame->widthStep] > this->hScrollBar3->Value-10) && (ptr[3*x+2+y*frame->widthStep] < this->hScrollBar3->Value+10))) { ptr[3*x+y*frame->widthStep] = 255; //H ptr[3*x+1+y*frame->widthStep] = 255; //S ptr[3*x+2+y*frame->widthStep] = 255; //V } else { ptr[3*x+y*frame->widthStep] = 0; ptr[3*x+1+y*frame->widthStep] = 0; ptr[3*x+2+y*frame->widthStep] = 0; } } }Для простоты подбора использую вот такую картинку:

-
спасибо!
-
привожу

-
Возникла некая проблемка, компилирую вот этот код в vs C++ 2008
// Поиск.cpp: главный файл проекта. #include "stdafx.h" #include "cv.h" #include "highgui.h" #include <stdio.h> #include <ctype.h> void FindBall(IplImage* Img); void Counter(IplImage* img); CvPoint2D32f center; float radius; long pointer=0; int main( int argc, char** argv ) { CvCapture* capture = 0; capture = cvCreateCameraCapture(CV_CAP_ANY); cvNamedWindow( "Demo", 1 ); for(; { IplImage* frame = 0; int i, k, c; frame = cvQueryFrame( capture ); if( !frame ) break; FindBall(frame); cvShowImage( "Demo", frame ); c = cvWaitKey(50); if( (char)c == 27 ) break; pointer++; } cvWaitKey(0); cvReleaseCapture( &capture ); cvDestroyWindow("Demo"); return 0; } void FindBall(IplImage* Img) { IplImage* Image=cvCreateImage( cvGetSize(Img), 8, 3 ); cvCopy(Img,Image); //Теперь необходимо получить доступ к всем пикселям. uchar* ptr1; ptr1 = (uchar*) (Image->imageData ); int i,j; for(i=0;i<Img->height;i++) for(j=0;j<Img->width;j++) { //R > 1.5*G, R > 2*B if (ptr1[j*3+2+i*Image->widthStep]>1.5*ptr1[j*3+1+i*Image->widthStep] && ptr1[j*3+2+i*Image->widthStep]>2*ptr1[j*3+i*Image->widthStep]) { ptr1[j*3+i*Image->widthStep]=255; ptr1[j*3+1+i*Image->widthStep]=255; ptr1[j*3+2+i*Image->widthStep]=255; } else { ptr1[j*3+i*Image->widthStep]=0; ptr1[j*3+1+i*Image->widthStep]=0; ptr1[j*3+2+i*Image->widthStep]=0; } } //Выделение контуров и поиск наибольшего контура Counter(Image); if (center.x>-1) { CvPoint p; p.x=center.x; p.y=center.y; cvCircle( Img, p, radius, CV_RGB(255,0,0), 3, 8, 0 ); } cvReleaseImage( &Image ); } void Counter(IplImage* img) { IplImage* img_gray= cvCreateImage( cvSize(img->width,img->height), 8, 1); CvSeq* contours = 0; CvMemStorage* storage = cvCreateMemStorage(0); cvCvtColor( img, img_gray, CV_BGR2GRAY ); cvFindContours( img_gray, storage, &contours, sizeof(CvContour), CV_RETR_LIST , CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0) ); CvSeq* h_next=0; //Поиск максимального контура for( CvSeq* c=contours; c!=NULL; c=c->h_next ) { if (c!=contours) { //Проверяем какой контур больше if (h_next->total>=c->total) { h_next->h_next=h_next->h_next->h_next; continue; } } h_next=c; } center.x=-1; if (h_next->total<200) return;//нет мяча - слишком маленькие контуры cvDrawContours( img, h_next, CV_RGB(255,0,0), CV_RGB(0,255,0),2, 2, CV_AA, cvPoint(0,0) ); //Минимальная окружность cvMinEnclosingCircle(h_next,¢er,&radius); cvReleaseMemStorage( &storage); cvReleaseImage( &img_gray ); } [/code]Код компилируется после создания окна вылезает окно, в нем написано "Дополнительные сведения: В экземпляре объекта не задана ссылка на объект."
и указывает с начало на эту строчку: if (h_next->total<200) return;//нет мяча - слишком маленькие контуры
потом, если её за коментить то указывает на вот эту строчку: cvMinEnclosingCircle(h_next,¢er,&radius);
и выдает следующую надпись"Дополнительные сведения: Внешний компонент создал исключение"
В чем может быть проблема?
-
-
Я так понимаю что в этом параметре расположены значения RGB каждого пикселя? Но не пойму как к ним добраться. Разясните?
Есть пример из книги:
// Пример 3-11. Установка "S" и "V" частей HSV изображения в 255. void saturate_sv( IplImage* img ) { for( int y=0; y<img->height; y++ ) { uchar* ptr = (uchar*) ( img->imageData + y * img->widthStep // Получаем указатель на начало строки 'y' ); for( int x=0; x<img->width; x++ ) { ptr[3*x+1] = 255; // Устанваливаем S и V в 255 ptr[3*x+2] = 255; } } }Не понимаю вот эти строки: uchar* ptr = (uchar*) (img->imageData + y * img->widthStep // Получаем указатель на начало строки 'y'
ptr[3*x+1] = 255; // Устанваливаем S и V в 255
ptr[3*x+2] = 255;
/////////////////////
т.е. ptr - это массив? и каждая его ячейка несет какойто определенный параметр?
п.с. в коде плоховато разбираюсь (
-
Добого времени суток.
А не проще отсканировать картинку на наличие небольшого красного (или того цвета которым светит лазер) пятна? Есле не пще то почему?
-
спасибо, разобрался )
-
Пытаюсь вывести изображение вот таким вот образом:
// получаем следующий кадр
frame = cvQueryFrame( capture );
// показываем кадр
pictureBox1->Image = gcnew System::Drawing::Bitmap( frame->width,frame->height,frame->widthStep,System::Drawing::Imaging::PixelFormat::Undefined, ( System::IntPtr ) frame-> imageData);
Но возникает ошибка: Необработанное исключение типа "System.NullReferenceException"
-
Для интеграции я еще слаб в коддинге на С++. А установка OpenCV и добавление библиотек к каждому новому проекту, нудное дело (
Кстате, а не пользовались такой штукой как VideoLab?
-
А для VS C++ нет не каких компонентов?

Очистка памяти
в OpenCV
Опубликовано · Report reply
спасибо! ) как всегда невнимателен - нашел ошибку ))))