
brutalis
-
Количество публикаций
45 -
Зарегистрирован
-
Посещение
-
Days Won
1
Сообщения, опубликованные пользователем brutalis
-
-
наконец то о начал работать. но после отсчета неготивных образов критует. и пишет это

-
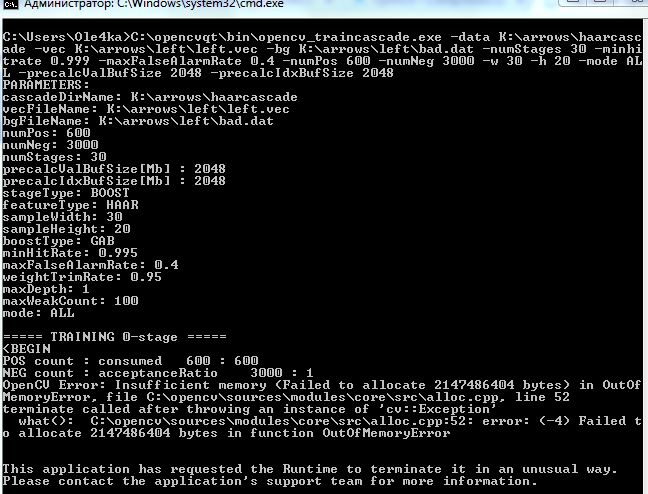
Памяти же не хватает!
не уверен. сколькоб я не я не указавал все равно критует. да и на компе ее немало. должно хватить
-
еще раз пытаюсь обучить каскад хаара. Для подсчёта итогового каскада используется программа opencv_traincascade.exe с ошибкой и выводмт следуующее
 подскажите в чем проблема.
подскажите в чем проблема. -
Здесь вроде та же ошибка решена:
http://answers.opencv.org/question/10872/cascade-training-error-opencv-244-train-dataset/
к сожалению не помогло(
-
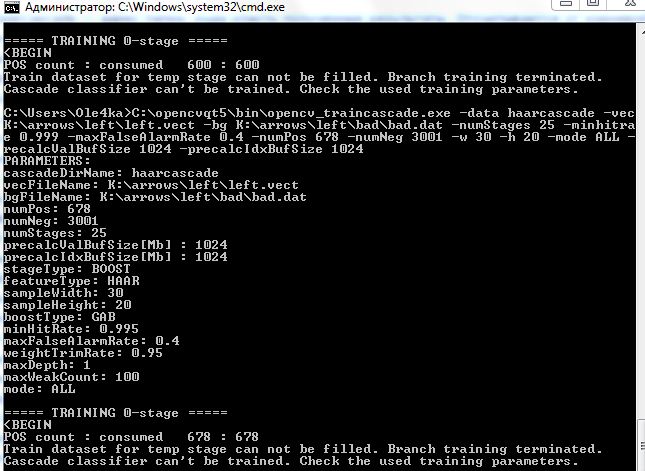
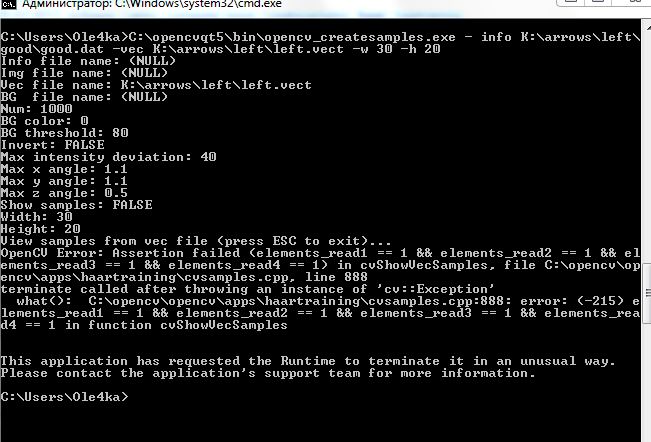
теперь такое пишет

я ничего не понимаю((
-
в том то и дело что есть
-
теперь при подсчете итогового каскада. выдает следующее

помогите разобраться
заранее спасибо
-
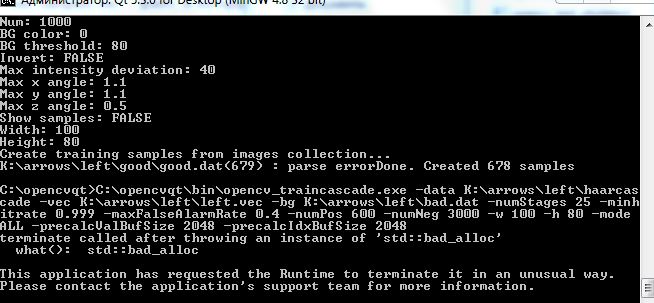
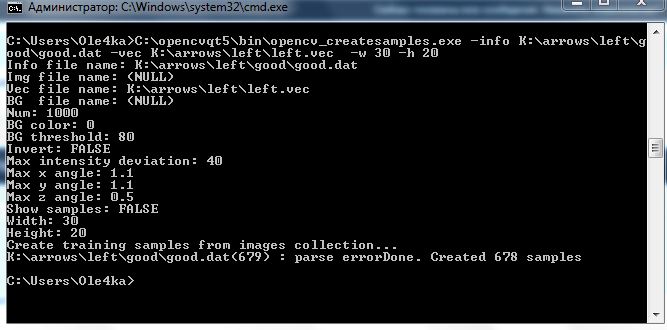
я ее победил. добавил еще столькоже файлов. создалось 678 сэмплов

-
 1
1
-
-
это странно. так как у меня все кончается на 705)
-
1
-
-
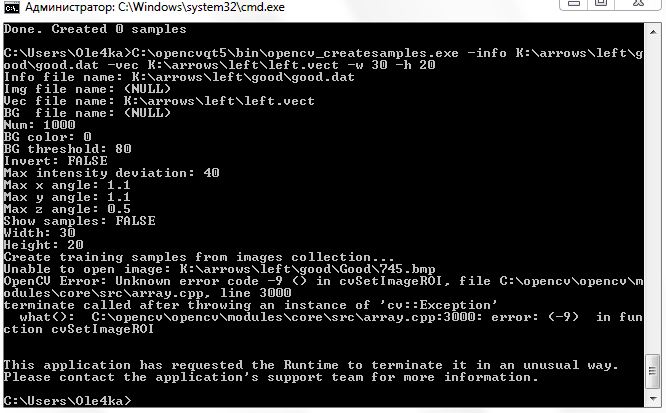
думается что не "- info", а "-info".
помогло но не совсем(
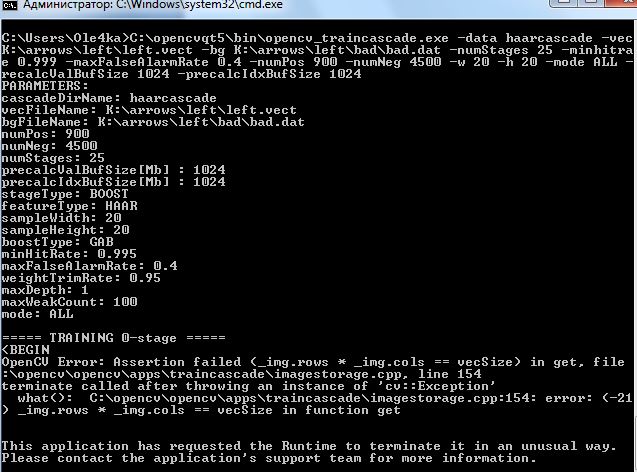
теперь начинает работать, но через пару минут критует и пишет следующее

-
1
-
-
пытаюсь обучить каскад хаара. при попытке привести позитивные изображения к общему виду opencv_createsamples завершается с ошибкой и выводмт следуующее
 . подскажите в чем проблема.
. подскажите в чем проблема.-
1
-
-
iskees, Спасибо за ответ. а можно тоже самое на с++. буду очень признателен.
-
еще раз всех приветствую.
помогите пожалуйста написать(напишите) программу, за вознагрождение.
1.распознание маркеров. таких как стрелочки например, думаю лучше использовать qr-код(возврат какой нибудь функции при обнаружении).
2.получить и отслеживать координаты точек(центра масс множества точек) расставляемых на картинке.
или что нибудь одно
самому не хватает знаний и времени.
среда разработки qt(mingw)+opencv под вин7
-
еще раз приветствую.
помогите пожалуйста написать программу для распознавания 10-15 qr кодов. она должна при нахождении на видео(видео идет потоком с камеры) нужного кода вернуть соответсвующую функцию.
самому не хватает знаний
среда разработки qt(mingw)+opencv под вин7
заранее спасибо
-
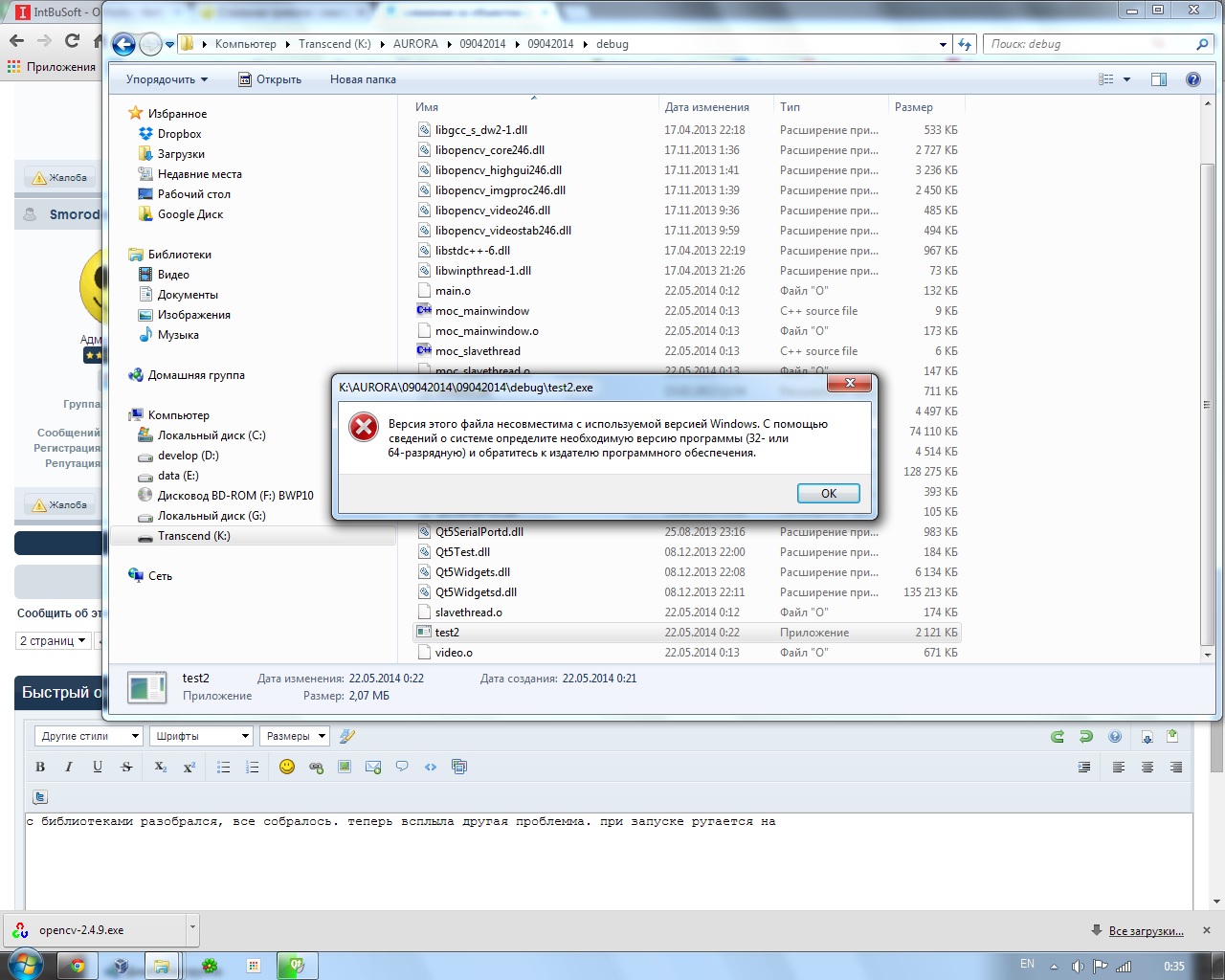
Просто разрядность системы не совпадает с разрядностью проекта, проект хочет юзать системные DLL-ки, а они не подходят.
Измените профиль проекта (x64 , win32).
не могли бы вы подсказать как это сделать. просмотрев профиль проекта я не нашел где там указанна разрядность. кроме выбора компиляторов таких как mvs2010/2012
-
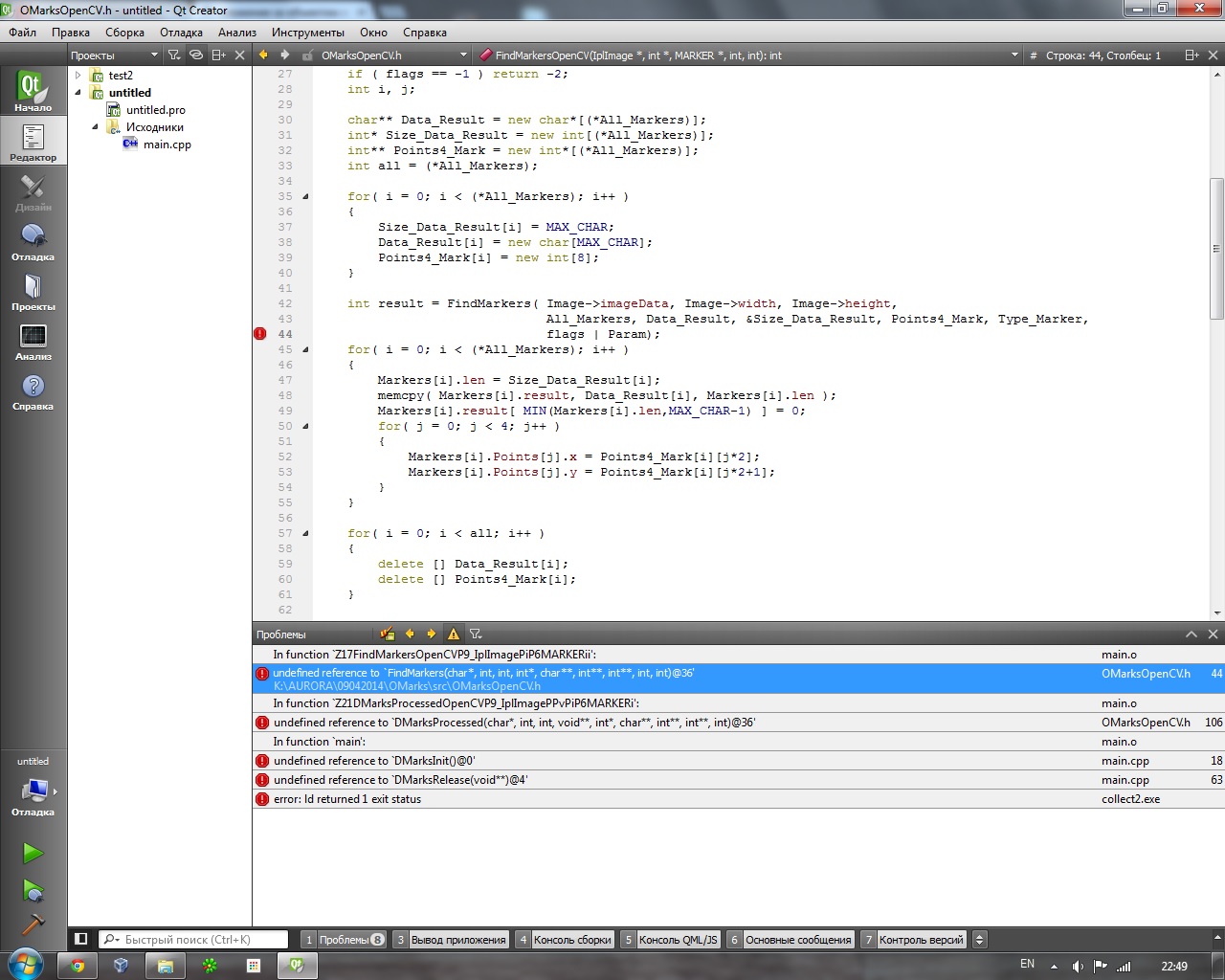
с библиотеками разобрался, все собралось. теперь всплыла другая проблемма. при запуске ругается на
 .
. -
всем доброго времени суток. нашел такую штуку. пытаюсь запустить пример и при компиляции выдается следующеею
 . не подскажите в чем проблема.
. не подскажите в чем проблема.пример пытаючь собрать в qt(mingw)
-
Но ведь маркер надо обнаруживать на видео! А ни у кого на форуме нет видео с маркерами, сделанными камерой робота. Можно ли написать пример обнаружения маркера на видео, не имея при этом видео с маркером? По-моему, нет. А ты как думаешь?
Казалось бы: можно распечатать маркеры и снять их другой камерой. Но возникают вопросы:
1. Какого физического размера должны они быть?
2. Надо ли из вырезать по контуру или прямоугольником, или эллипсом?
3. Снимать камерой с каким фокусным расстоянием, какой оптикой, какой матрицей?
4. Снимать в каких условиях освещённости? Ночью?
5. Камера расположена на какой высоте и под какими углами?
6. Проведена ли калибровка камеры?
7. С какой частотой кадров снимает камера?
А самый главный вопрос: зачем вообще с этим заморачиваться, если топикстартер не может выложить даже маленький кусочек видео с маркером?
2Smorodov: С обычными стрелками есть смысл заморачиваться, если робот после будет участвовать в каких-нибудь соревнованиях, где используются именно такие указатели. Ну или строится прототип автопилотируемого автомобиля, который в будущем будет уметь понимать разметку.
1.маркеры изначально планировалось делать на листе А4 в виде различных указателей типа срелок но это не принципиально.
2.вырезать не надо.
3.камера D-Link DCS-932L.
4.условия различные. в основном темно.
5.высота и угол изменяемы. тк движется не только робот но и "голова". голова еще и вращается
6.нет
7.окло 30 fps
видео не снимали так как не думали что это важно.
-
Даже не знаю, что сказать. Как захватывать видео с камеры - все знают. Про пирамидального Лукаса-Канаде тоже, благо пример с ним уже много лет входит в поставку с OpenCV. Получить координаты точек тоже легко, если была произведена калибровка камеры.
Ты лучше скажи, как тебе помочь? Что сделать? Написать код, работоспособность которого писавший не сможет проверить? А смысл тогда писать? Допустим, кто-нибудь возьмёт и напишет реализацию слежения за маркером и... что? Что он должен дальше делать? Купить робота, чтобы проверить качество написанного?
покупать ничего не надо. задача заключается в том чтобы при обнаружении нужного маркера программа возвращала что нибудь. например функцию. тоже с точками.
реализацией движения робота занимается др человек. ему просто нужно чтобы было к чему привезаться
-
видеопоток с камеры я получаю так
{ { CvCapture* capture = cvCaptureFromCAM( KAMIND );// где KAMIND индекс камеры в системе //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ if(capture == NULL)// Если камер не обнаружено proverka();assert( capture ); cvSetCaptureProperty(capture, CV_CAP_PROP_FRAME_WIDTH, 320);//1280); cvSetCaptureProperty(capture, CV_CAP_PROP_FRAME_HEIGHT,240);//960); int counter=0; char filename[512]; while(true){ // получаем кадр frame = cvQueryFrame( capture ); // показываем cvShowImage("Video", frame); char c = cvWaitKey(33); if (c == 27) {break;} // нажата ESC else if(c == 13) { // Enter сохраняем кадр в файл sprintf(filename, "Image%d.jpg", counter); printf("[i] capture... %s\n", filename); cvSaveImage(filename, frame);cvSaveImage(filename, dst); counter++;}} // освобождаем ресурсы cvReleaseCapture( &capture ); cvDestroyWindow("capture");cvDestroyAllWindows(); }где KAMIND индекс камеры в системе. камеру регистрирую через IP Camera DS Filter.
так что камеру можно использовать любую.
обрабатывается потоковое видео с камеры. само видео с камеры не записывал.
задача заключается в том чтобы при обнаружении одного из известных маркеров(выше уже упоминал какие) возвращалась функция.
с точками немного сложнее.
за точками слежу как написанно тут http://recog.ru/library/opencv/opencvtrackingpoint.pdf
мне нужно получить координаты точки(лучше центра масс нескольких точек)и желательно без сильной привязки к цвету т.к. картинка большую часть времени идет чб из-за особенностей используемой нами камеры камеры. из виде могу только самого робота показать.тут ранняя версия робота. первые 6-7 ссылок.
-
всем доброго времени суток. помогите реализоваь\сделать один из указанных выше пунктов(отслеживание точки или движение по аркерам.)
самому не получается. и сроки уже поджимают.
-
помогите пожалуйста. пытаюсь собрать библиотеки отсюда http://www.uco.es/in...pos/ava/node/26. не собираются.ругается как на картинке
 . или может я что не так делаю?
. или может я что не так делаю? -
Да, ТЗ оставляет желать лучшего. Но маркеры под запрошенные подзадачи подходят
 .
.В ТЗ должно быть (желательно с иллюстрациями):
1) Цель проекта (что должно получиться в результате, для чего это вообще, и что оно должно делать).
2) Накладываемые ограничения.
2.1) Железо на котором будет выполняться программа.
2.2) Жестко заданные условия (например, жестко определен набор маркеров, ...)
2.3) Язык (среда) реализации.
..................................
2.n) .....
3) Допустимые погрешности, неточность и т.д.
ТЗ
Исходные данные для разработки
Вездеходный робот-разведчик должен выполнять ряд задач без участия оператора. Требуется разработать систему визуальной навигации такого робота и реализовать полученные решения на действующем макете.
1. Обзор работ по решаемой проблеме и постановка задачи по разработке и реализации аппаратно-программного обеспечения системы визуальной навигации вездеходного робота-разведчика
Основные разделы по специальности (в соответствии с требованиями Государственных образовательных стандартов)
2. Исследовательский раздел (материал по исследованию предметной области, предмета проектирования, анализ вариантов решения задач, выбор конкретного варианта):
2.1. Обзор существующих систем визуальной навигации роботов
2.2. Принципы построения систем визуальной навигации роботов
2.3. Выбор и анализ аппаратных компонентов, программных решений и инструментария для разработки и реализации системы визуальной навигации вездеходного робота-разведчика
3. Специальный раздел (раскрываются все аспекты проектируемой области):
3.1 Разработка архитектуры системы визуальной навигации вездеходного робота-разведчика
3.2. Разработка механизмов доступа к видеокамере и предобработки видеоинформации
3.3. Разработка и реализация подсистемы навигации вездеходного робота-разведчика на базе алгоритма отслеживания множества точек
3.4. Разработка и реализация подсистемы навигации вездеходного робота-разведчика по маякам
По поводу железа. вся обработка ведется на пк. на роботе установлена ip камера(пока это D-Link DCS-932L ).
Реализуем на QT(mingw) с opencv. под винду.
Жестких ограничений по маркерам нет. единственное не должно быть привязки по цвету, тк камера в основном показывает в чб.
ps да это диплом
pss после успешной защиты постараюсь всю расписать и выложить на форуме
-
Сьрелочки расклеиваютсч на пути следования машинки. При обнаружении стрелочки она должна выполнить действие согласно указателю. Повернуть на заданный угол, ехать прямо или назад или развернуться

каскад Хаара
в OpenCV
Опубликовано · Изменено пользователем brutalis · Report reply
заработал. проблема в том что "-numNeg 3000" 3000 негативных образов для него оказалось много. пока работает с 3. буду искать мах, пока не кританет
критануло на 400. 350 работает