
KAIIUK
-
Количество публикаций
32 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные пользователем KAIIUK
-
-
13 минуты назад, Nuzhny сказал:Я раньше делал достаточно просто: использовал обычный детектор движения (камера была неподвижная), треки объектов отслеживались, время от времени запоминал изображение объекта. Когда объект пропадал, то искал его в окрестностях по последнему его сохранённому изображению (cv::matchTemplate). Если объект оставался на месте в течение какого-то времени (скажем, минуты), то он считался оставленным. Такой подход неплохо работал и не тормозил.
Пробовал использовать обычный детектор(GMM), но сливаются люди и предметы + периодически либо просто не видит то, что по цвету схоже с фоном, либо видит то, чего нет. Проблема в том, что мне нужно получить специфически большую точность для не очень качественного набора тестовых данных. Вот ищу альтернативы GMM, но что то совсем тухляк =(
-
35 минут назад, Nuzhny сказал:Имеется в виду детектор оставленных и унесённых предметов в системах видеонаблюдения?
По большему счету да, но интересует только "оставление"
40 минут назад, Nuzhny сказал:Имеется в виду детектор оставленных и унесённых предметов в системах видеонаблюдения?
в дополнение скажу, что видел ваш пост про супер пиксели, но не смог дойти до того, как их использовать для своей задачи.
-
Доброго времени суток. Интересует такая тема, как нахождение недвижимого предмета на переднем плане(т.е изначально он отсутствовал), перепробована куча вариантов и алгоритмов, но ничего стабильного так и не найдено, возможно кто то что то реализовывал похожее?
-
1 час назад, Smorodov сказал:Низкие частоты в центре, высокие на периферии их амплитуда - яркость, вроде все понятно.
При резком повороте остаются только низкие частоты (во всяком случае в направлении поворота).
Засвет, ну постройте гистограмму, посмотрите как распределена яркость, если все в куче, то скорее всего низкая контрастность или засвет, в зависимости от того, где эта куча находится.
Какими средствами извлечь высокие частоты? В смысле не совсем понимаю, у меня есть спектр, как из него это извлечь? Писал на плюсах
-
Доброго времени суток. Подскажите пожалуйста, как проанализировать спектр, который выдает преобразование Фурье. Необходимо проверить на отсутствие высших частот в спектре, чтобы узнать была ли расфокусировка камеры.
P.S. И если кто знает, то как детектировать резкий поворот камеры и засвет(пока есть идея бинаризации)
-
Детектор движения есть, в нем нет необходимости. Стандартный пример вполне годный, но когда человек уходит дальше(уменьшается его моделька) он пропадает, как поправить?
-
Метод относительно хороший, т.к достаточно часто теряет объект из поля зрения(я про стандартный), для трекинга плохо подходит. Если его обучить заново, даст плоды, неизвестно?
-
Всем доброго вечера, я наконец то смог снова зайти на сайт, чему безгранично счастлив. Знаю что задача решалась, что есть готовый сэмпл в opencv, но хотелось бы получить от вас подсказку, мб ссылки на статьи, исходники. Вопрос следующий: первоначально нужно обнаружить человека в кадре на видео и соответственно осуществить трекинг(если несколько людей, то всех), затем буду всякие доработки, но пока это) Есть идея отделять передний и задний фон, обнаруживать движение и проверять человек ли это, но если он встанет или будет стоять до начала работы, то станет фоном. Что подскажете, как лучше реализовать?
P.S. Считаем что камера находится сверху(не перпендикулярно земле, а под углом).
Заранее спасибо. -
query point - это точка в n-мерном пространстве, которую подашь на вход и хочешь например найти k точек которые наиболее близки к ней.
Буквально минут за 5 до ответа это понял и уже возник следующий вопрос. Так получается, что фотографии могут быть близки не именно к этой фотографии, а последовательно, т.е 1-2, 2-3, 3-4,4-5, и т.д, т.к велика вероятно того что уже 3 или 4 фотография не будет матчится на мой пример, а будут относится все к тому же зданию. Как такое решить?
-
http://www.compvision.ru/forum/index.php?/topic/1732-бенчмарк-методов-для-nearest-neighbour-search/
можете посмотреть это, но думаю вам хватит flann.
flann уже встроен в opencv.
http://docs.opencv.org/modules/flann/doc/flann_fast_approximate_nearest_neighbor_search.html
Вроде разобрался, только не могу понять что такое query point, у меня есть вектор, в которой значения asift от изображений, а как его использовать с knnSearch? или не та функция?
-
Добрый день, форумчане. Была уже похожая тема, но на этот раз все ушло дальше, а чем дальше, тем интереснее.
Имеем сравнивание 2х изображений средствами ASIFT, 300 изображений, гору энтузиазма и ТЗ. =)
Требуется скомпоновать все изображения относящиеся к одному зданию по папкам.
А теперь собственно то, с чем хочу к вам обратиться: можно сравнивать каждое изображение с каждый(тупо брутфорсом), да, метод действенный, но чем больше изображений, тем больше временные затраты на их матчинг( после 10 изображений на каждое уходит по 2 сек, ближе к 60 уже по минуте, а у нас их 300), я слышал про такую штуку как kd tree, но в упор не понимаю как ее припилить к моему модулю. Может ли кто то дать пример с этой штукой/дать пример конкретно к моей задаче(омг как же я буду благодарен)/подсказать другие варианты сравнения изображений(напомню что используем ASIFT). На 300 изображений уходит слишком много времени на данный момент.
-
Сложно сказать, можно попробовать GrabCut или LevelSet сегментацию, с начальным приближение по найденной Вами маске, но это не быстрые методы.
ЗЫ: Да, я думаю HOG (обученный на здания) должен неплохо справляться.
Скорость методов на данный момент не имеет значения, сейчас поищу инфу про методы сегментации, мб подойдут.
-
Ну я несколько иное выделение имел здесь ввиду.
Выделение прямоугольником, как результат работы детектора.
Если прямоугольные области совместить с полученной Вами маской, то дороги, лес и т.д. автоматически будут исключены.
Дороги сейчас меньшая из проблем, а вот куски оставшиеся рядом со зданиями портят все контура. Возможно ли что то сделать с промежуточным результатом, который имеем?(отделить дома от лишних кусов рядом с ними)
Я думаю HOG+SVM или Haar+AdaBoost здесь могут быть довольно эффективны.
Особенность изображений зданий на виде сверху, это наличие большого количества ортогональных друг другу граней.
Это будет давать на гистограмме градиентов характерную картинку (шаг 90 градусов между пиками).
т.е HOG обучить на здания?
-
Задача решаемая, Вы ведь можете найти здания
") , значит информации достаточно. Другое дело вычислительные затраты на это.
, значит информации достаточно. Другое дело вычислительные затраты на это.Вот посмотрите такую штуку:
http://cs.stanford.edu/people/karpathy/rcnn/
Ее ведь можно и на здания натаскать.
Можно также сначала применить любой другой детектор, Виолы-Джонса, SVM+HOG, ... получите набор областей для дальнейшей обработки.
Затем применить уже контурную сегментацию, сегментацию по цвету, ну и т.д.
Дороги и многие другие лишние объекты должны отсеяться.
RCNN это вещь, но пока что поджимают сроки и она позволит определить лишь область, а нужно выделить именно контур здания) Области со зданиями выделяются же.
-
Самый простой вариант это отфильтровать контуры по моментам и по площади.
Почитаю, попробую что то сделать. Спсибо.
А как насчет чисто программерского решения: взять туже область карты в векторном представлении, дернуть из неё маску для нужных объектов, а потом эту маску уточнить уже по фотографии?
Немного не понял. Если бы были примеры в виде кода, ссылки или фото, был бы признателен.
Тут к зданиям зацепляются куски асфальта и прочего, поэтому не получается выделить четкий контур, а выделение четкого контура очень важно.
-
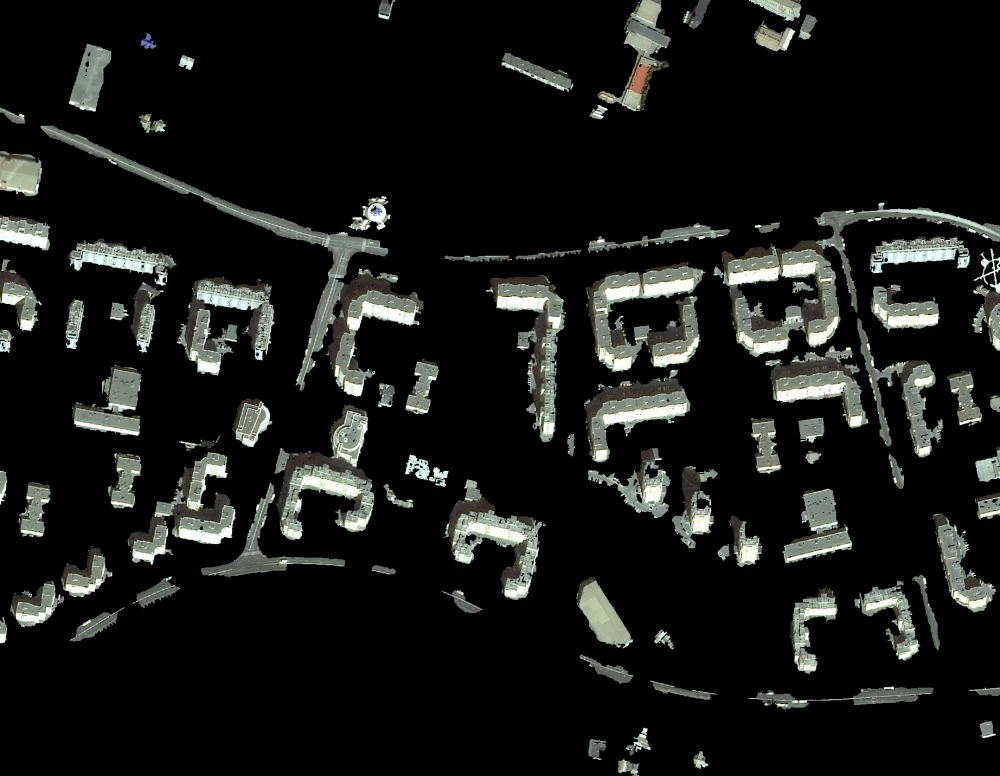
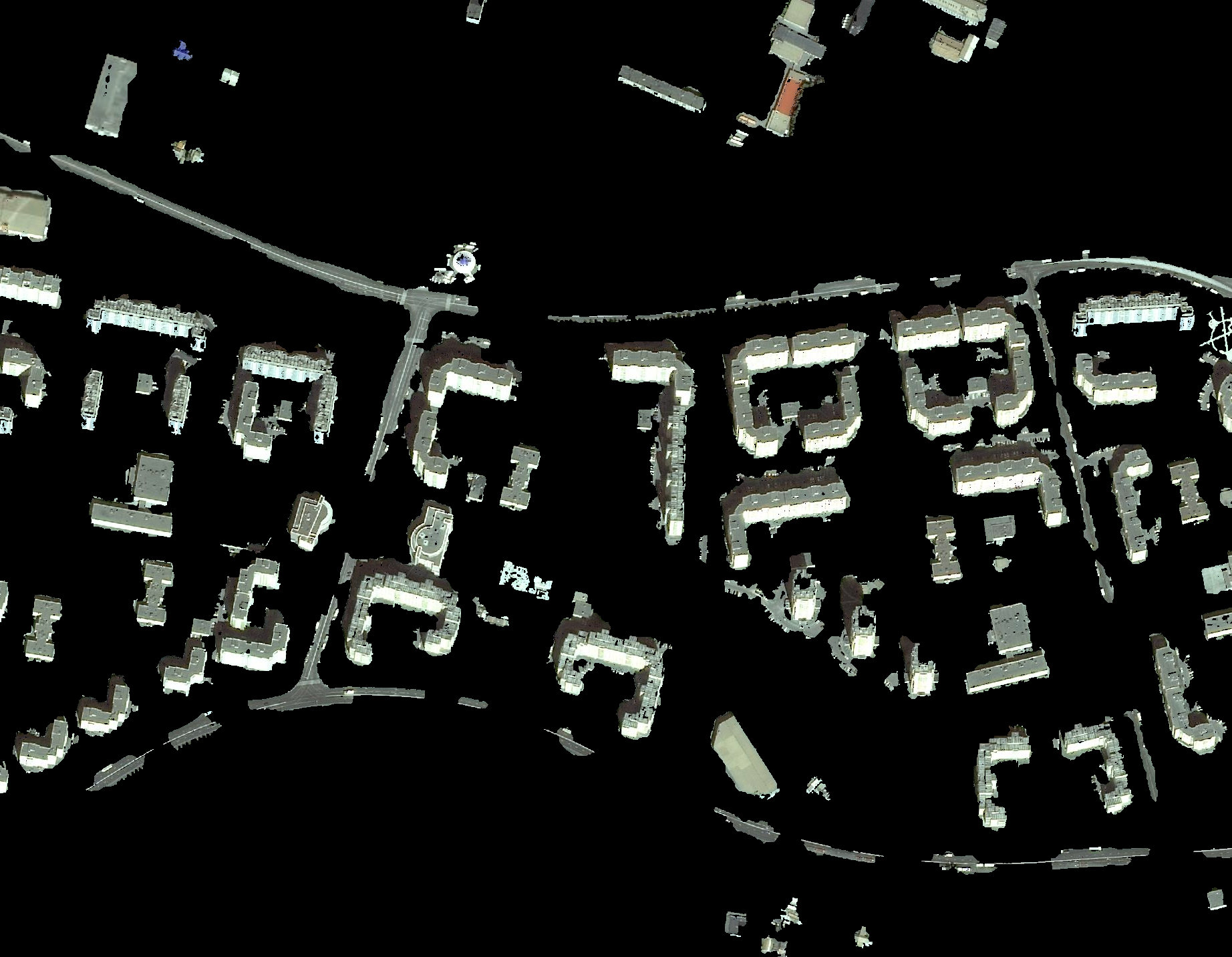
Доброго дня форумчане. Поздравляю с обновлением сайта). Помогите советом, как получить контура с фото, приложенных. То что получается у меня тоже прилагаю, но результат крайне неудовлетворителен.Так же необходимо убрать лишний шум(остатки дорог и прочее). Заранее благодарен.


-
Возможно я неправильно что то делаю, или плохие фотографии, возможно есть пример кода или open source проект, чтобы посмотреть как верно и доделать под свою задачу. Здание сфотографированное по кругу, с перекрытием около 30-40% на фото не группирует...
-
Не дает точных результатов, к сожалению. Есть ли еще варианты?
-
Доброго времени суток, форумчане. Я снова вынужден просить помощи. Подскажите пожалуйста, как кучу фотографий(300+) группировать. Именно даны здания с разных ракурсов, необходимо найти все фото каждого здания и сгруппировать в отдельной папочке.
-
а конкретно нужно просто вытащить контура здания из 5 фотографий по кругу
-
Попробуем)
-
Запустил PhotoScan для твоиз трёх снимков: и точек много нашлось, и итоговая 3D модель неплохо выглядит. Видимо, я не очень хорошо понял твою проблему. Ммм... Может, обведи на картинках места, которые не получается соединить? Или результаты работы твоего алгоритма, чтобы всё таки понять, что конкретно не получается.
Вот эта программа как раз делает то, что надо. А мне необходимо именно КАК она это делает...
Я не могу использовать готовое ПО, необходимы алгоритмы по которые оно работает, чтобы создать аналог(можно брать куски кода если проект opensource)
-
не получается соединить с другой стороной здания(прилегающей).
Может быть в bundler что то есть, отдельная функция или что то такое? не известно?
-
С SIFT опробовано все, по ТЗ есть набор из 300+ фоток, из них найти которые относятся у одному зданию, а затем склеить и получить контуры с сохранением отношений. В какую сторону дальше идти пока не понятно.


Недвижимый предмет в кадре
в OpenCV
Опубликовано · Report reply
Движение камеры за человеком интересно сделано, совсем нет расфокусировки. Вычитание фона + YOLO пробовал, в общем то это пока лучший работающий прототип, но все равно люди и сумки сливаются сильно на том же GMM