
Vasily
-
Количество публикаций
3 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные пользователем Vasily
-
-
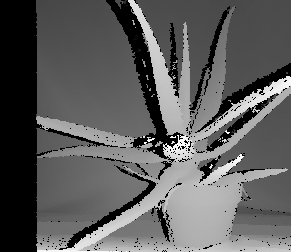
Ну не знаю, у меня стандартный пример выдает вот что:
по мне, так вполне сносно.
а на opencv\samples\cpp\ (leftXX.jpg и rightXX.jpg)
-
Всем привет. Пробую построить disparity map для 2-х стерео камер. Для начала решил поиграться с тем, что есть в примерах из OpenCV.
Изображения взял из opencv\samples\cpp\ (leftXX.jpg и rightXX.jpg)
1. откалибровал камеры по этим изображениям (stereo_calib.cpp). получил ошибку RMS error = 0.47
2. построил disparity map (stereo_match.cpp) пробовал алгоритмы Bm, SGBM, HH, VAR. c параметрами по умолчанию, пробовал менять параметры в различных пределах. Всеравно какая-то лажа получается.
Это в OpenCV их же пример криво рабтают? или вообще с disparity там полная ж...?
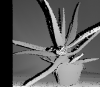
Вот наиболее лучший результат из того, что получилось

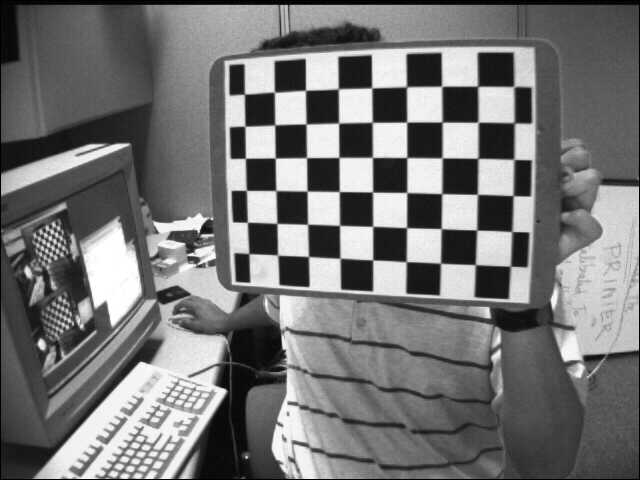
Исходные изображения:
Левое:

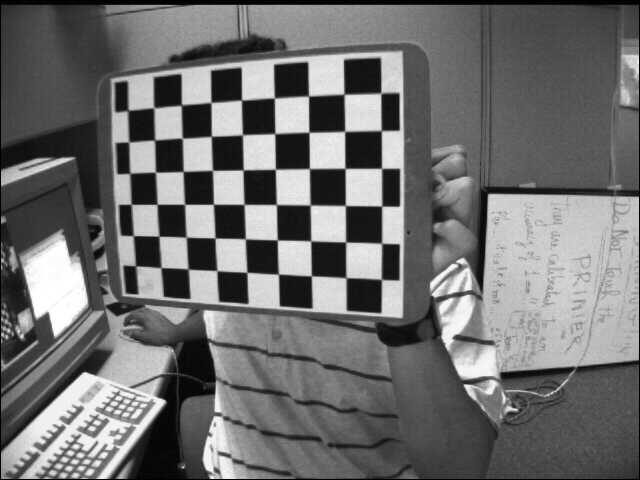
Правое:

У меня задача, построить карту помещения. Нужно стены нормально видеть.
Вообще реально добиться чего-то наподобии

или


определение границ комнаты
в OpenCV
Опубликовано · Report reply
нужно на серии изображений с камеры детектировать угол комнаты как внутренний, так и внешний. пока то, что я нарыл
blur -> canny -> HoughLinesP
Но оно дает очень плохие результаты, так как в комнате попадвются двери, картмны, просто какие-то объекты и линии там хорошо детектируются, а для углов из-за того, что они не всегда четкие то преобразование canny часто их теряет.
есть какие то подходы получше?