
Король
-
Количество публикаций
50 -
Зарегистрирован
-
Посещение
-
Days Won
5
Сообщения, опубликованные пользователем Король
-
-
А вот и сам Tracking.
-
Ладно че нибудь придумаем, или прийдется ждать новой версии EMGU и OPENCV
-
Да я пользуюсь Emgu.CV! Для меня С++ страшная вещь. Но чуть-чуть понимаю . Не знаю что и делать.
-
Всем спасибо сделал все, я написал свой трекинг, чуть-чуть поиграл с параметрами BackgroundSubtractorMOG. И вот результат.
-
Bgslibrary - не помогло. Снега очень много (ложники)
Votr - еще не смотрел
-
-
Спасибо
-
Erode(2) сделал частично но при сильном снегопаде появляются ложники. Вот результат, и последовательность.
-
Так даже папки (файла) с таким названием нет. Может это в другой версии Opencv.
-
Поправьте мне, если не так, в Opencv 3.1 должно быть реализованы алгоритмы "KCF", "TLD" судя по этому http://docs.opencv.org/3.1.0/d2/d0a/tutorial_introduction_to_tracker.html, но я не нахожу файл " <opencv2/tracking.hpp>. Может найдутся знатоки которые подскажут что не так я делаю.
-
Срочно возникла такая проблема сильный снег и дождь, качание деревьев - как с этим бороться в детекторе движения?
Вот такой детектор у меня на тепловизоре работает проблем нет, а вот с камерой проблемы - алгоритм BackgroundSubtractorMOG. Посоветуйте где глянуть, что почитать
-
Мое распознавание цифр. Распознавание цифр и определение координат X, Y камеры поворотной. Выкладываю программу.
-
Да Стилсофт нам конкурент! А у Стилсофта автотрекинг как работает если не секрет? Ты писал? А ты если не секрет где работаешь?
-
На Интреполитехе и наши там были с тепловизором. Спасибо за статью - почитаем. Как получиться - отпишушь. Сейчас устройства нет пока, чтобы проверить все мысли.
-
Ладно, понял, спасибо за советы, может от дали узнаем как получать зуум. А про калибровку где можно почитать?
-
А где можно почитать про калибровку? что-то я не нахожу, Зарание спасибо.
на работе собираем из деталий сборный тепловизор с камерой. Bik-Inform - платформа, аналоговый тепловизор Dali, видеосервер (Панасоник WJ-GXE100) преобразователь из аналогового сигнала в цифру, и камеру IPшную. От Bik я могу узнать только x,y - координаты. Видеосерверы заказали Axis может с ними будет возвращать значения зуума.
Да то что у меня на аватарке - это и есть устройство поворотное.
-
Я уже и не надеялся что кто-то откликнуться! Спасибо!
По поводу алгоритмов particle filter, TLD, KCF - большое спасибо, попробую реализовать.
А как правильно откалибровать камеру? Координаты платформы х,y BIk-Inform 404 я легко найду с помощью xml запроса. А вот зуум из протокола Onvif пытался найти (функция GetStatus-PTZ), но панасоник - преобразователь из аналогового сигнала в цифровой, выдает 0, при любом зууме. И еще вопрос как измерить скорость человека и сопоставить со скоростью поворотной платформы?
-
Здравствуйте форумчане!
Скажите пожалуйста как сделать автотрекинг объекта (чтоб камера поворачивалась за выделенным объектом). Первый наметки сделал осталось прикрутить зуум. Не знаю пока как прикрутить зуум. Чтобы приближался к объекту. Жду вашего совета! В первой версии реализовано пока так. Есть две зоны которые находяться слева и справа. Вычисляется угол направления самого крупного объекта, потом если он зашел человек допустим в левую зону с углом направления от 225 до 315 - то поворот налево. Реализованы пока только поворот налево, направо. И работает по принципу: отследил-повернул-отследил-повернул.
Вот интересные видео:
 https://www.youtube.com/watch?v=iU6D5WLdXMo
https://www.youtube.com/watch?v=iU6D5WLdXMo
https://www.youtube.com/watch?v=vQKGhIPiqs8
Хочу сделать что-то подобное!

-
На грязных врядли найдет. Но на плохо освещенных, частично номер в тени - проверял нормально работает
-
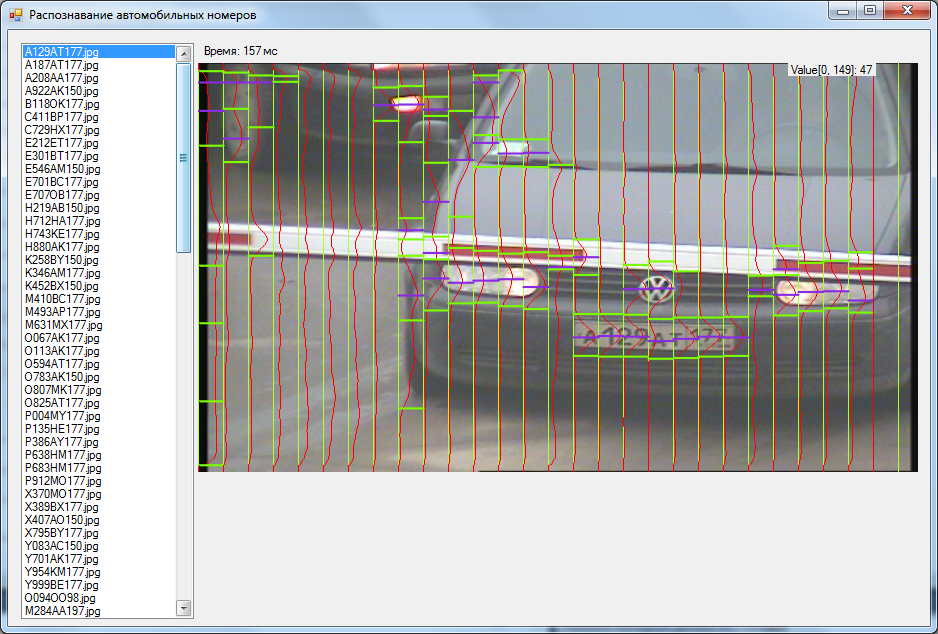
Это нарезанные куски из второго изображения. Где показываются максимумы и минимумы кривой. Он идет первым то что находится вверху изображения (А так их много). Программа ищет максимумы за средней линии. Соответственно опускается до окончания минимума. И выдергивается горизонтальная линия из изображения. Дальше из этого горизонтальной линии беруться куски где значения за среднее линии и похоще на номер. Это и будет номер. Вот алгоритм.
-
Мое видео с распознаванием автомобильных номеров
-
 1
1
-
-
Вот мой ответ на распознавание авто номеров. Правда я только начинающий в OpenCV. Пример локализации номера по примеру фирмы Элвис.
Вот и сам пример делал по библиотекам Emgu 2.2

-
1
-

Детектор движения
в Обсуждение общих вопросов
Опубликовано · Report reply
Это мы проверяли как на дистанции дальних и ближних рубежах будет ли работать